
Safe Execution of Bipedal Walking Tasks from Biomechanical Principles
Andreas Hofmann
Introduction
Effective use of autonomous robots in unstructured, human environments requires that the robots have: 1) sufficient autonomy to understand task-level commands from humans, so that interaction with such a robot is as with another human, 2) sufficient size and strength to be able to perform useful tasks in the environment, 3) sufficient speed to accomplish tasks in a timely manner, and 4) sufficient operating safety while utilizing their size, strength, and speed. A particularly challenging case of such a robot is a bipedal walking machine. In terms of the above-stated requirements, a biped should have sufficient autonomy to execute commands to walk from one location to another, sufficient strength and speed to accomplish the task in a reasonable amount of time, and it should not fall down, if at all physically possible, even if there is a significant disturbance. Although dynamically stable walking machines have been built, the problem of planning and control in the presence of significant disturbances, has not been studied extensively.
In this research, we investigate how walking goals for bipeds should be expressed, and how control actions should be generated that achieve such goals, even if disturbances occur. As part of this investigation, we seek to understand basic balance strategies used by humans, and how they should be integrated to reject significant disturbances. Based on analysis of human biomechanics and walking motion data, we have found that there are three basic balance control strategies that humans use: 1) stance ankle torque, 2) step adjustment, and 3) movement of non-contact limbs to generate angular momentum about the center of mass. Previous implementations of bipedal walking machines have relied extensively on the first of these, but have made limited use of the second, and have almost completely ignored the third. This is a problem because there are common situations where each is needed.
This research presents a task-level execution system that integrates the three strategies to allow for safe execution of walking plans in unstructured environments. The system uses a novel multivariable controller that decouples the biped into seemingly independent systems. This allows us to extend flexible plan execution techniques, previously used only for discrete systems, to complex hybrid discrete/continuous systems such as bipedal walking machines. Walking plans are expressed in terms of state-space and temporal goals, and are efficiently transformed into an executable form, that includes all necessary control information, by a plan compiler. We evaluate our approach using a high-fidelity simulation of a bipedal walking plant.
Balance Strategies
Humans use three balance strategies: stance ankle torque, stepping, and movement of non-contact segments, as shown below. All of these seek to control the center of mass in a beneficial way. In the first strategy (left picture), the ankle of the stance leg exerts torques against the ground to shift the center of pressure under the foot, which changes the ground force acting on the center of mass. This strategy can be used when disturbances are not very severe. For more severe disturbances, the second strategy, stepping (middle picture), is used to change the base of support. This allows for a larger shift in center of pressure, and therefore, larger restoring forces on the center of mass. If foot placement is restricted, as in tight-rope walking (right picture), the third strategy, movement of non-contact segments can be used. With this strategy, the arms, torso, and non-stance leg are used to generate an angular torque about the center of mass. By conservation of angular momentum, this exerts a restoring torque on the center of mass about the foot contact point [1].
 |
 |
 |
Task-level Executive
Walking tasks are represented using a qualitative state plan, which specifies a sequence of qualitative poses (whether the system is supported on one leg or two), foot placement locations, and general spatial and temporal goals, as shown below. The qualitative state plan is interpreted by a model-based executive, which generates torque commands for the walking machine.
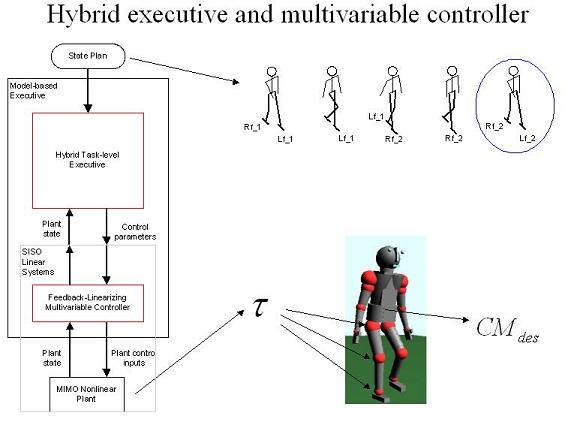
The model-based executive consists of two parts: a hybrid task-level executive, and a multivariable controller. The hybrid task-level executive compiles the qualitative state plan, generating a control plan with more specific, quantitative goals for each pose in the sequence, and control law parameters that achieve these goals. The executive then sequences through each pose, applying control parameters according to the control plan. The multivariable controller linearizes and decouples the controlled plant, thereby presenting an idealization of the real plant to the hybrid task-level executive. This simplifies the executive's compilation of control parameters. If a disturbance occurs, the executive may adjust control parameters, within limits specified in the control plan, to compensate. The combined action of the executive and multivariable controller results in an automated integration of the three balance strategies [2].
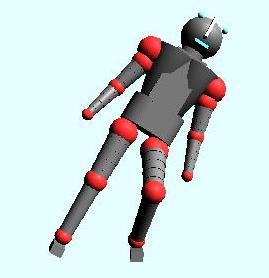
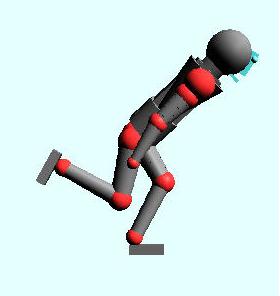
Multivariable Controller
The ability to balance in single support (while standing on one leg) is an important requirement for walking and other bipedal locomotion tasks. We have developed a control algorithm that provides enhanced flexibility and robustness in the control of balancing while standing on one leg by coordinating the exertion of stance leg ankle torques with movement of non-contact limbs. Current approaches to balance control generally assume the presence of explicitly specified joint reference trajectories or desired virtual forces and calculations based on static body configurations to derive the necessary actuator torques. The former approach has limited robustness, the latter does not account for, or take advantage of forces that could be produced by body motion independent of ground contact. The multivariable controller improves on these limitations through the following key architectural features:
- A two-stage model-based plant linearization is used to simplify control of abstract variables such as the center of mass location,
- A quadratic programming formulation is used to determine motion of contact and non-contact limbs useful for achieving control targets while satisfying dynamic balance constraints
- A sliding control framework provides robustness to modeling error.
This approach results in complex behavior in reaction to disturbances, with significant movement of the torso and swing leg (as shown below), even though the behavior specification is very simple and general (keep the center of mass centered) [3].
 |
 |
 |
References:
[1] M. Popovic, A. Hofmann, and H. Herr. Zero Spin Angular Momentum Control: Definition and Applicability. In Humanoids 2004, Los Angeles, CA, USA, Nov. 2004.
[2] A. Hofmann, and B. Williams. Safe Execution of Temporally Flexible Plans for Bipedal Walking Devices. In ICAPS Workshop on Intelligent Dispatching, Monterey, CA, USA, June 2005.
[3] A. Hofmann, S. Massaquoi, M. Popovic, and H. Herr. A Sliding Controller for Bipedal Balancing Using Integrated Movement of Contact and Non-Contact Limbs. In IROS 2004, Sendai, Japan, Oct. 2004. See also http://people.csail.mit.edu/people/hofma/Research.htm for more details
The Stata Center, Building 32 - 32 Vassar Street - Cambridge, MA 02139 - USA tel:+1-617-253-0073 - publications@csail.mit.edu (Note: On July 1, 2003, the AI Lab and LCS merged to form CSAIL.) |