
EGGWAY: A Dynamically Stable Robot with an Action-based Social Interface
Jessica Banks
Project Overview
Due to advances in artificial intelligence (AI) and engineering that have made situated, semi-autonomous systems achievable, researchers have begun to identify metrics for human-robot interaction (HRI). Our research aims to investigate such interactions as they pertain to utilitarian mobile robots. We define this class of robots to be systems whose primary functionality is responsive and safe locomotion in unstructured human environments. Unlike humanoid platforms, these robots will perform specific tasks under the interactive supervision of a human master (e.g., personal assistance, delivery, surveillance, human/robot transport). Moreover, they will not boast anthropomorphic features or the range and depth of human competency because their practical applications will not require such complexity. Even though they won't look or function like humans, these machines should still conform to both our social and physical environments. If they are to integrate effectively into our lives, we must be able to communicate with them on an intuitive, seamless level.
Based on the underlying notion that humans prefer to interact with machines in the same way we interact with each other, there are many possible modes which this human-robot dialogue could employ (e.g., natural language, facial expression, gesture, etc.). Our goal is to to codify a communication protocol that can be framed in the context of a robot's mobility. In other words, we aim to establish how a robot's motion can convey its state and reciprocally, how a human can control the robot through direct physical contact (e.g., pushing, patting, leaning). This research is carried out on a mobile robot platform called Eggway. For organizational purposes, we dissect the work into three separate, though interdependent, veins: form, function, and formality.
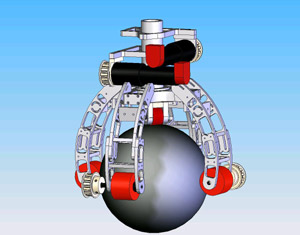
Form involves the design and fabrication of the mechanical, computational, and sensing hardware of the robot. Eggway (see figure) is a dynamically stable, sphere-based robot capable of omnidirectional locomotion. Because it actively balances on only a single point of contact with the floor, the robot can afford to have a very small footprint (as opposed to statically stable wheeled platforms). This holonomic design makes it particularly well-suited for maneuvering in environments built to accommodate the human form.
Function deals with the low-level software control of the robot. This level prescribes how the system moves (versus why the system moves). In particular, there are three major components of Eggway's low-level functionality: dynamic stabilization involves how robustly the robot balances, locomotion refers to how well the robot translates in space, and user compliancy refers to how the robot performs the prior two components when a human is in contact with it. This last aspect dictates a safe and responsive user interface for human-robot interaction, including how robustly and reliably the robot reacts to environmental perturbations (e.g., changes in terrain and object collisions) as well as user handling (e.g., "manual" steering, stopping, disabling, and accidental impacts). (See work on ensemble control for a detailed description of the dynamic stability control).
Formality involves higher-level software implementation and analysis of the human-robot interaction on a more social level, i.e., how the robot interprets user commands in the force domain and how it conveys its own state. We plan to investigate, through well-defined experiments and surveys, what meaning, or state people associate with particular robot actions and likewise what intentions they believe correspond to their own actions. We will thus qualify and quantify an intuitive action-based repertoire for mutually effective interaction with a general mobile platform. Success in the domains of form and function is a prerequisite to achieving this main contribution. We will interpret the findings with respect to practical applications of the robot, emphasizing its use as a rehabilitative or assistive device such as an active walker.
Related Literature:
[1] Fong, Kaber, Lewis, Scholtz, Schultz, & Steinfeld. Common metrics for human-robot interaction. In IEEE Int'l. Conference on Intelligent Robots and Systems, Sendai, Japan, 2004.
[2] T. Fong, I. Nourbakhsh, & K. Dautenhahn. A survey of socially interactive robots, 2002. Available from: citeseer.ist.psu.edu/ fong03survey.html.
[3] F. Grasser, A. D'Arrigo, S. Colombi, & A. Rufer. Joe: A mobile, inverted pendulum. In IEEE Transactions on Industrial Electronics, volume 49, pp. 107--114, 2002.
[4] R. Mukherjee, M. Minor, & J. T. Pukrushpan. Simple motion planning strategies for spherebot: a spherical mobile robot. In Proc. 38th IEEE Int'l Conf. on Deciaion and Control, Pheonix, AZ, Dec 1999.
[5] J.L. Patton. Global Modeling of Adaptive Dynamic Balance Control. PhD thesis, Northwestern University, 1998.
[6] Marc. H. Raibert. Legged Robots That Balance. MIT Press, Cambridge, MA, 1986.
The Stata Center, Building 32 - 32 Vassar Street - Cambridge, MA 02139 - USA tel:+1-617-253-0073 - publications@csail.mit.edu (Note: On July 1, 2003, the AI Lab and LCS merged to form CSAIL.) |