
Nonlinear Models of Purkinje Cell Simple Spikes and Cerebrocerebellar Control During Primate Circular Arm Movement
Kazutaka Takahashi & Steve G. Massaquoi
Abstract
During a horizontal planar manual tracking task, primate cerebellar Purkinje cells (PC's) exhibit a wealth of simple spike (SS) firing activity patterns. Initial analyses [1] showed this activity to be significantly correlated linearly with hand kinematics. However, a significant amount of variance remained to be explained, and a functional relationship between cellular firing and arm control had not been established. Two nonlinear models are now proposed.
Method
A monkey tracked a target with a cursor on a screen by moving a horizontal planar manipulandum. The target followed a 5 cm radius circle at five speeds from 3.1 cm/s to 8.4 cm/s, both clockwise and counterclockwise. SS activity from 69 PC's over 320 trials each was analyzed.
Models
The UPVS model includes 6 free parameters but also hand position-hand speed and hand velocity-hand speed cross terms. It is motivated by the observation that the depth of modulation of many PCs varies with speed while maintaining a basic dependence upon position and velocity. The nonlinear Recurrent Integrator Cerebellar Simple Spike (RICSS) model is based upon a RIPID model of cerebrocerebellar control [2]. It includes 23 free parameters and parsimonious assumptions regarding cerebellar system neuroanatomical architecture and its role in long-loop feedback processing. In particular, the RICSS proposes that SS derive from tracking error signals arriving from cerebral cortex via signal parallel fibers that are then modulated by sensed limb state information conveyed by selector parallel fibers and basket cells. PC SS activity should therefore be related to both feedforward and sensed kinematic information.
Results and Analysis
Examples of the fits for the three models are shown
in Figure 1.
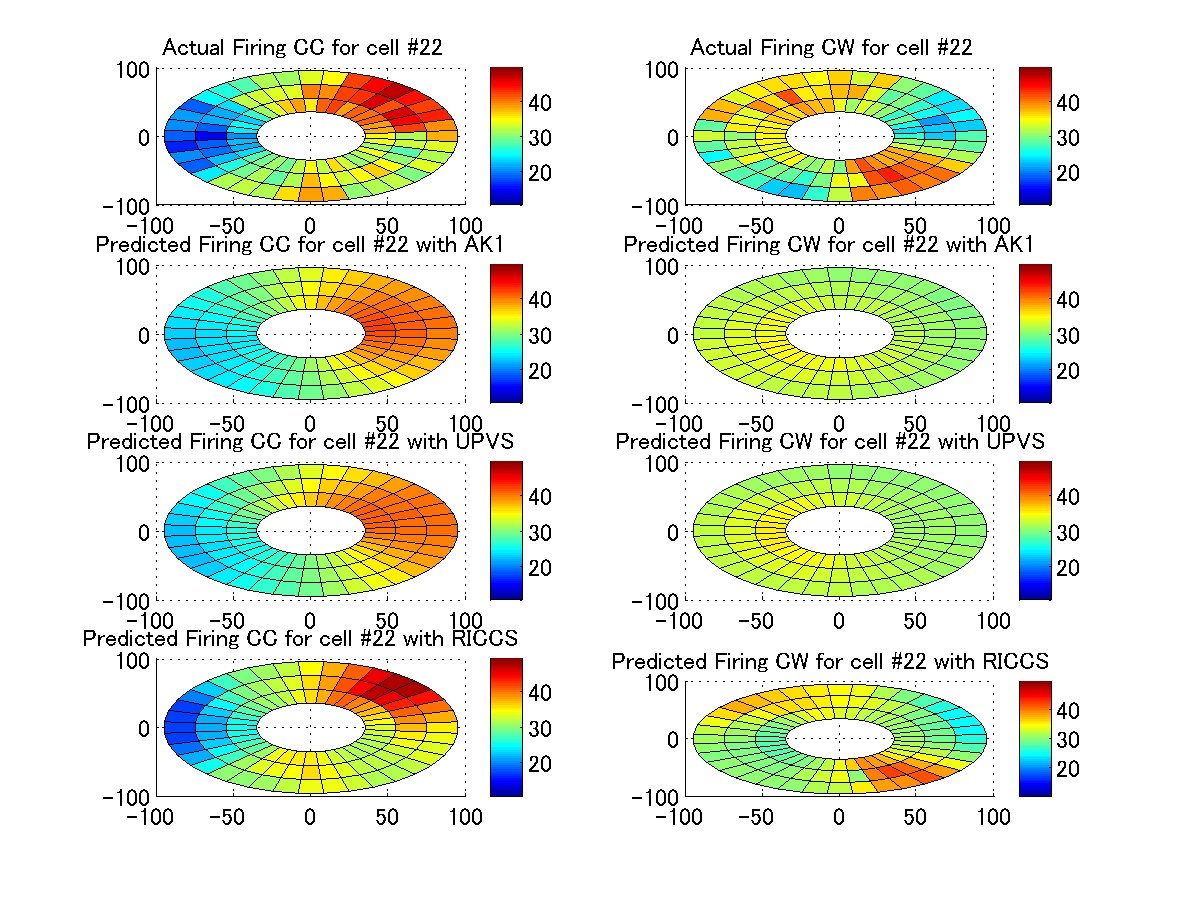
In each figure, the radius is the tangential hand speed, circular angle relative to the origin of the doughnut is the hand location relative to the center of the work space. The left column shows the firing/fit for counterclockwise (CC) rotational direction, and the right column for clockwise (CW) direction. The top row shows averaged SS firing date from cellular recording is plotted. The second row shows initial linear kinematic model, the third UPVS, and the bottom row shows RICCS. UPVS captures the date moderately better than the linear model. However, RICCS captures asymmetry across rotational directions, non-monotonic speed dependency (see CW figure around 4-5 o'clock direction), and multimodality of actual cells. The average R-squared provided by the initial kinematic model (above) in joint coordinates, the UPVS and RICSS models were, respectively, 0.30, 0.35 and 0.48. Their efficiencies in explaining variance in relation to their numbers of free parameters was assessed in this order using Akaike's Information Criterion. Descending AIC values were obtained indicating that the UPVS and RICSS models are likely to be progressively closer to the "true" system despite the significantly larger number of free parameters in the latter.
Conclusion and Future Work
Two nonlinear models, UVPS and RICCS are proposed. Each performs better than simple linear kinematic models, especially to account for speed dependent-depth of firing modulation. Nonlinear dependency between the two is very similar. Complexity analysis shows that UPVS and RICCS progressively improve and approach to the true system. RICCS can capture multimodal, asymmetric, and non-monotonic speed dependency. RICCS offers a possible cerebrocerebellar structure for cellular processing in cerebellum to be used as an element of gain-scheduling controller [2]. Future work includes 1) feasibility of the RICCS for intercept phase of the data, 2) feasibility of the RICCS for segmented command, and 3) generalization of the RICCS to investigate neuro-adaptive structure and algorithm.
References:
[1] A.V. Roitman , M.T.V. Johnson, and T.J. Ebner, Purkinje cell discharge encode position, direction and speed of movement during circular manual tracking in monkey, in Abstracts in Society for Neuroscience Annual Meeting in Orlando, 2002
[2] S. Jo and S.G. Massaquoi, A model of hybrid scheduled stabilized long-loop control of human balance, Biological Cybernetics , 2004, 91(3): p.188-202
The Stata Center, Building 32 - 32 Vassar Street - Cambridge, MA 02139 - USA tel:+1-617-253-0073 - publications@csail.mit.edu (Note: On July 1, 2003, the AI Lab and LCS merged to form CSAIL.) |