| Technical Reports | Work Products | Research Abstracts | Historical Collections |
![]()
|
Research
Abstracts - 2006
|
|
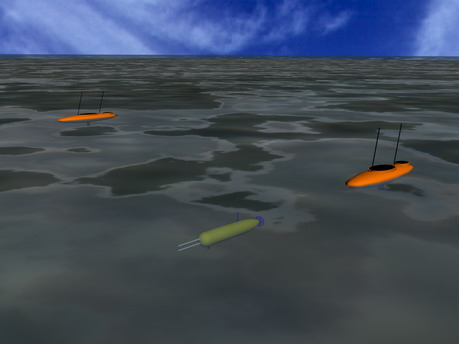
Cooperative Navigation For Autonomous Underwater VehiclesAlexander Bahr & John J. LeonardIntroductionWith the vast majority of the oceans unmapped and unexplored, Autonomous Underwater Vehicles (AUVs) have the potential of being a leap frog technology for many ocean sciences. Missions that now rely on expensive support ships can be carried out with one or several autonomous vehicles and thereby increasing the spatial and temporal coverage of a single research team. They also enable new types of missions, like under-ice exploration or very long endurance runs. MotivationAfter two decades of research and development AUVs have matured to a point where they are now widely used in several fields from oceanographic research to oil exploration and defense applications. While great progress has been made in some areas, the fundamental problems of reliable navigation and communication remain. The use of several vehicles allows for new types of missions but also poses new challenges for communication, coordination and vehicle-to-vehicle navigation. ApproachSuccessful navigation is not only crucial for any type of mission, it is also an interesting application for multi-vehicle scenarios as each individual vehicle has the possibility to improve the knowledge about its own position by exchanging information with others. We are trying to adapt concepts that are known from land robotics to the difficult underwater environment with its hard constraints such as the absence of absolute navigation sensors (no GPS) and high bandwidth communication (no radio). ExperimentsAs ocean going experiments require months of preparation and are expensive to carry out, we use Autonomous Surface Crafts (ASCs) as stand-ins for AUVs. The ASCs are essentially kayaks with a PC, thruster and GPS which are equipped with the same underwater communication and navigation equipment as the AUVs. This allows us to test navigation algorithms with the same constraints which are imposed in the underwater environment while obtaining ground-truth positions through GPS. Once or twice a year AUVs and ASCs are deployed, often as part of larger experiments such as GOATS04, FAF05 and PlusNet06. Research SupportThis research is suppported by the Office of Naval Research under grants N00014-02-C-0210 and N00014-97-1-0202.
References:[1] J. Curcio, J. Leonard, J. Vaganay, A. Patrikalakis, A. Bahr, D. Battle, H. Schmidt, and M. Grund. Experiments in Moving Baseline Navigation using Autonomous Surface Craft, In Proceedings of IEEE Oceans, September, 2005. [2] J. Vaganay, J. J. Leonard, J. A. Curcio, and J. S. Willcox. Experimental Validation of the Moving Long Base-Line Navigation Concept, In Proceedings of IEEE Conference on Autonomous Underwater Vehicles<\em>, July, 2004. |
|||||||
|