| Technical Reports | Work Products | Research Abstracts | Historical Collections |
![]()
|
Research
Abstracts - 2006
|
|
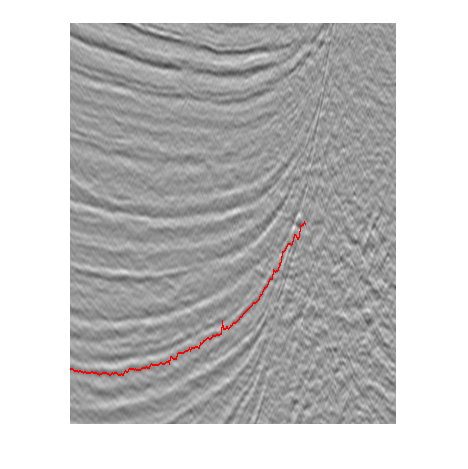
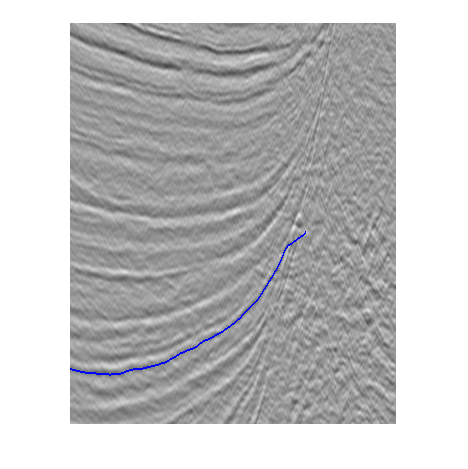
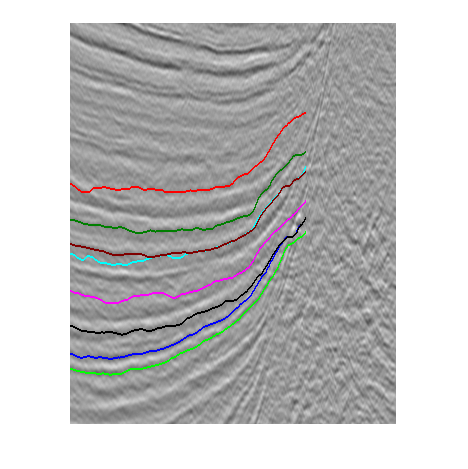
Detecting Structure in 3D Geological DataBiswajit Bose, John Fisher, Polina Golland & Eric GrimsonThe ProblemGiven a 3D intensity volume obtained through acoustic imaging of the earth, we seek a dense interpretation of the volume, including horizons, faults and salt domes. ChallengesThis problem poses interesting theoretical challenges. Detecting structures from intensity data has been studied in great detail in the computer vision community. In particular, for medical vision applications, it is important to detect closed 3D surfaces representing important anatomical structures. In geological data, there is an analogous surface detection problem: horizons are open surfaces. The challenge here is to be able to detect multiple horizons which have similar shapes and extents. Fault surfaces, which show up as discontinuities in horizon surfaces, also need to be detected. ApproachWe propose a representation combining the appearance and shape of the horizon within a snake (active contour) model. Since the horizons are mostly horizontal surfaces, we fix its horizontal extent, and detect its vertical position. We model the appearance variation (in the vertical direction) centred at the horizon location by a low-dimensional Gaussian vector. The shape of the horizon is modelled locally by using a smoothness prior (that is, requiring first and second partial derivatives to be small). Starting from a single labelled horizon, we minimise the snake energy function in order to determine the most likely location of that horizon. To detect multiple horizons, we translate the detected horizon above and below (while keeping its shape constant) to find adjacent minima in the energy function. This is then used as the initialisation for the next energy minimisation. This process is repeated to find more horizons. Preliminary ResultsWe started with a 2D implementation of the snake detection algorithm. Here, we process a single vertical slice through the 3D volume:
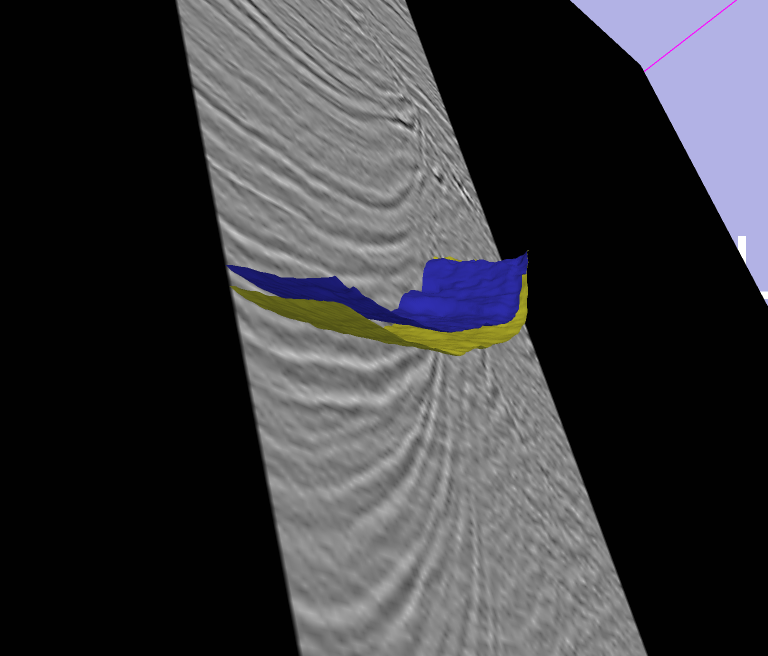
Subsequently, we extended this to a full 3D implementation:
Future WorkOur preliminary results are promising, but there is clearly much that remains to be done. While detecting multiple horizons using our procedure, the horizons tend to drift. This problem may be solved by jointly optimising over multiple horizons, with suitable constraints enforcing similarity of shape of adjacent horizons. Further, we plan to automatically determine the horizontal extent of each horizon (perhaps in conjunction with fault detection). AcknowledgementThis research was supported by funding from Royal Dutch Shell. |
|||||||||||
|