| Technical Reports | Work Products | Research Abstracts | Historical Collections |
![]()
|
Research
Abstracts - 2006
|
|
Computational Models of Spatial CognitionGary Look & Howard ShrobeMotivationThe goal of our work is to understand how people organize their knowledge of large-scale space and how they use these representations to reason about the spatial relationships between different places. In this abstract, we describe our approach to developing computational models of human spatial cognition that are also cognitively plausible. Two questions we are particularly interested in are:
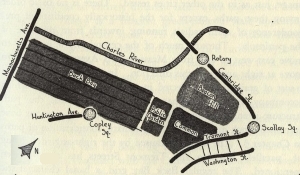
This work has two benefits. From an AI and cognitive psychology standpoint, it provides a better understanding of how people reason about space. From an applications standpoint, our work will allow us to improve the recommendations given by location-based systems and simplify route descriptions and maps that are produced by wayfinding applications such as MapQuest and Google Maps. In this abstract, we focus on the work we have done to address the first of the two questions presented above. ApproachKevin Lynch's seminal work The Image of the City [1] changed the way urban planners viewed the relationship between people and the city they live in. In Image, Lynch states that while urban planners have particular notions of form and function in mind when laying out a city, they must also be aware of the overall mental image that people have of the city. To develop a theory of how people create their image of a city, Lynch carried out extensive case studies in three different cities: Boston, Los Angeles, and Jersey City. Despite the differences in how these cities are laid out, Lynch found similarities in the elements people used to describe their mental map of a city. These elements are nodes, paths, edges, districts, and landmarks. Nodes are major centers of activity and paths are used to travel from one place to another. Edges are linear elements that function as impermeable boundaries between areas. Of these elements, Lynch found that most people structured their image of the city around paths and districts. However, for a city to be legible, all five of these elements must be well defined and clearly integrated with one another. While Lynch defines the types of elements in an individual's mental image of a city, he does not describe how people identify these elements. To address this problem, we use a rule-based approach to define features people associate with nodes and then identify areas of a city with node-like properties using a geographic information system (GIS). We then use the nodes we find along with local demographic patterns and the topology of the surrounding street network as constraints in identifying the extent of the districts in a city. Our node-finding algorithm considers areas that are surrounded by land parcels from a wide range of land use classifications (e.g., residential, commercial, etc.) as potential nodes [2]. We also consider commercial areas surrounding major transit hubs and traffic thoroughfares as potential nodes. ProgressWe are in the process of conducting a user study to determine how well our methods identify the nodes of Boston. In this study, we ask participants to indicate places in Boston they consider as nodes. We treat these responses as ground truth and then compare the ability of our algorithm against a GIS dataset listing various points-of-interest to see which is more accurate in identifying nodes. We will also ask people to qualitatively rank maps produced by our algorithm against commercially available maps to see which does a better job of capturing a person's mental representation of Boston. Figure 1, below, illustrates this point.
Figure 1. On the left is a sketch taken from The Image of the City. It depicts the prominent places in a person's conceptual map of Boston. One of our goals is to use GIS to create high-level maps similar to this one. The map on the left shows our progress to date; this map the different nodes our node-finding algorithm has identified. AcknowledgementsThis work is supported by DARPA's BICA initiative. References:[1] Kevin Lynch. The Image of the City. The MIT Press, 1962. Second printing. [2] Raj Singh. Adapting geographic information systems to sketch planning needs. Master's thesis, Massachusetts Institute of Technology, 1996. |
||||||||
|
|||||||||