
| Technical Reports | Work Products | Research Abstracts | Historical Collections |
![]()
|
Research
Abstracts - 2006
|
|
EGGWAY: A Dynamically Stable Mobile Robot for Human AssistanceJessica L. BanksProject DescriptionSo where are all the robots? Weren't they supposed to be among us by now - serving us or coming after us? Oh, there's one...vacuuming under the couch. Two and a half inches tall works for the Roomba, an appliance that is intended to clean the living room floor specifically without human supervision. But the robots with which we are to interact naturally will need to be scaled more appropriately. They will need to maneuver safely and responsively in our unstructured, dynamic environments, conforming both physically and socially to human-centric criteria. However, like the Roomba, most mobile platforms boast large footprint to height ratios and low centers of mass in order to accommodate multi-wheeled drive configurations. The constraint for static stability renders many robots ill-suited for very uneven or sloping terrains, fast accelerations, and human contact. We believe that locomotion based on dynamic stability suggests a promising alternative for robot mobility. Admittedly, control of passively unstable systems has long been a topic of engineering and computer science research. A growing body of evidence supporting the feasibility and efficacy of a variety of actively balancing robot platforms has accumulated over the last two decades [2,3,4,5,6,7]. Such robots have nonlinear dynamical models that incorporate varying degrees of active stability. Our research investigates the problem of dynamic stability control on a platform called Eggway which locomotes on a ball and thus lacks any element of passive stability. We frame our motivations as being systemically analogous to the compliant force control of a single Series Elastic Actuated [1] joint. We are especially interested in how Eggway may be used as an assistive device for people who need help balancing themselves. For organizational purposes, the work is dissected into three separate, though interdependent, veins: form, function, and formality. Form involves the design and fabrication of the mechanical, computational, and sensing hardware of the robot. Eggway is a light-weight spherically wheeled robot capable of omnidirectional locomotion. Because it actively balances on only a single point of contact with the ground, the robot can afford to have a very small footprint (as opposed to statically stable wheeled platforms). This design makes it particularly well-suited for maneuvering in environments built to accommodate the human form. Function deals with the low-level software control of the robot. This level prescribes how the system moves (versus why the system moves). In particular, there are two major components of Eggway's low-level functionality: dynamic stabilization involves how robustly the robot balances in place and locomotion refers to how well the robot translates in space, including how robustly and reliably it reacts to environmental perturbations (e.g., changes in terrain and object collisions). The control requires us to extend deterministic methods to real-time probabilistic control paradigms for nonlinear dynamics. We hope to prove that such a method can produce even more robust balance on a completely dynamically stable platform than that which some statically stable systems exhibit. This is a fairly counterintuitive result. However, the features that make a particular platform even partially statically stable can actually undermine its mobility. The two-wheeled base configuration of the Segway, for example, determines a rigid polygon of support which can act as a moment arm for generating torques about the roll axis. A dynamic perturbation, such as a bump or lateral collision, at one of its wheels could effectively cause the Segway to topple. Formality deals with user compliancy which refers to how the robot performs the prior two functional components when a human is in contact with it. This higher-level software implementation dictates a safe and responsive interface for human-robot interaction, including user handling in the force domain (e.g., "manual" steering, stopping, disabling, and accidental impacts). Success in the domains of form and function is a prerequisite to achieving this final contribution. We will interpret the findings with respect to practical applications of the robot, emphasizing its use as a rehabilitative/assistive device such as an active walker. 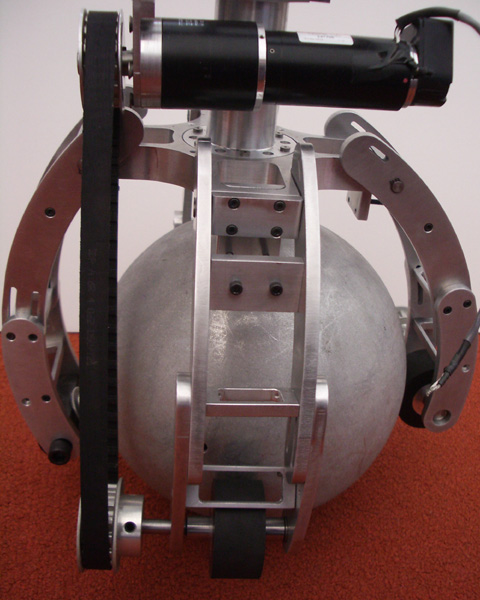
References:[1] Matthew M. Williamson. Series Elastic Actuators. MIT AI Technical Report N. 1524, January 2005. [2]F. Grasser, A. D'Arrigo, S. Colombi, & A. Rufer. Joe: A mobile, inverted pendulum. In IEEE Transactions on Industrial Electronics, volume 49, pp. 107--114, 2002. [3]K. Hirai, M. Hirose, Y. Haikawa, & T. Takenaka. The development of Honda humanoid robot. In IEEE International Conference on Robotics and Automation, 1998. [4]T. Larson. Balancing robot project - "bender". Available from: http: //www.tedlarson.com/robots/balancingbot.htm. [5][W. Nukulwuthiopas. Gyrobot. Available from: http://fibo.kmutt. ac.th/project/eng/current research/gyrobot.htm. [6] Marc. H. Raibert. Legged Robots That Balance. MIT Press, Cambridge, MA, 1986. [7] The Segway Human Transporter. Available from: http://www.segway.com/segway/. |
|||
|