| Technical Reports | Work Products | Research Abstracts | Historical Collections |
![]()
|
Research
Abstracts - 2006
|
|
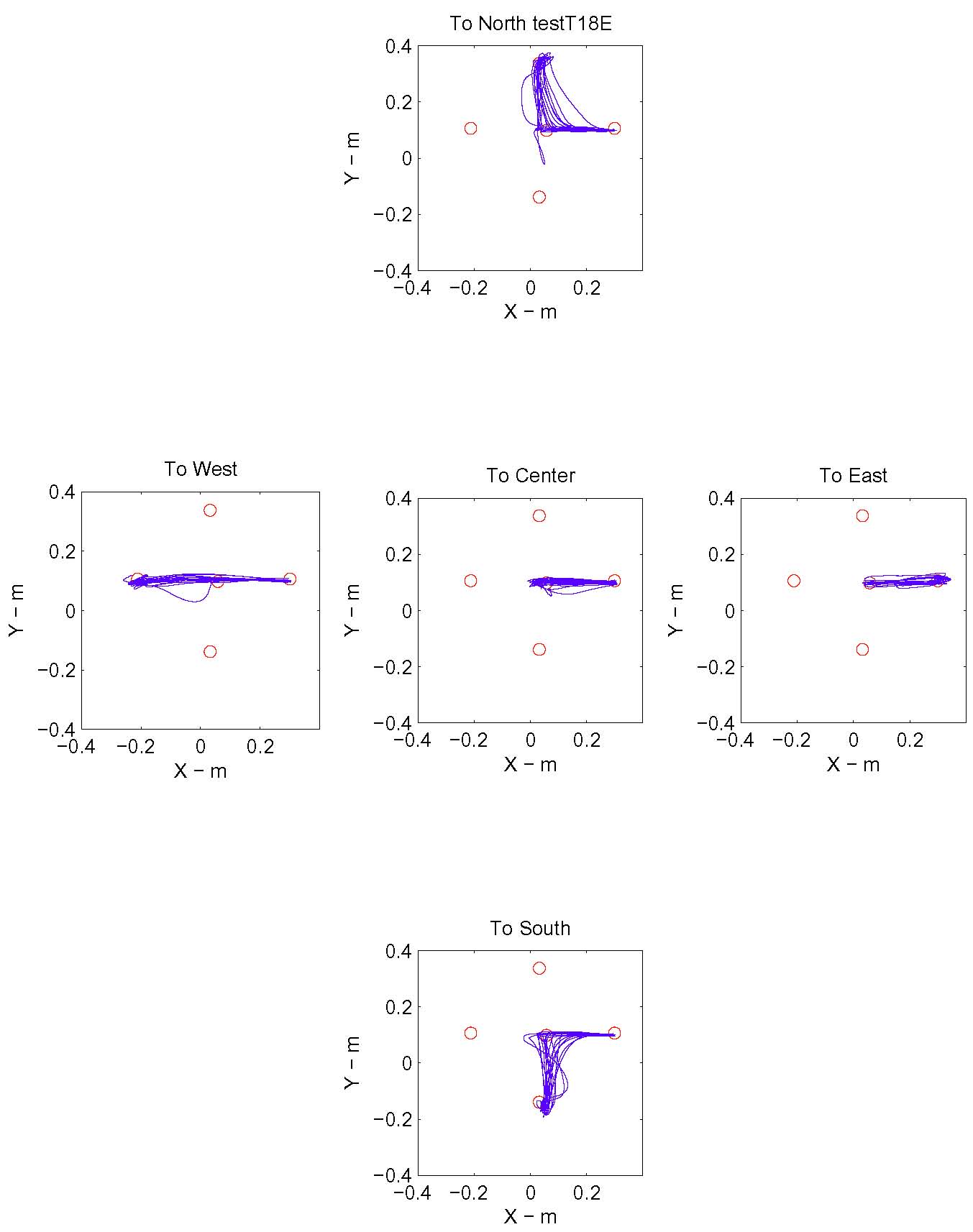
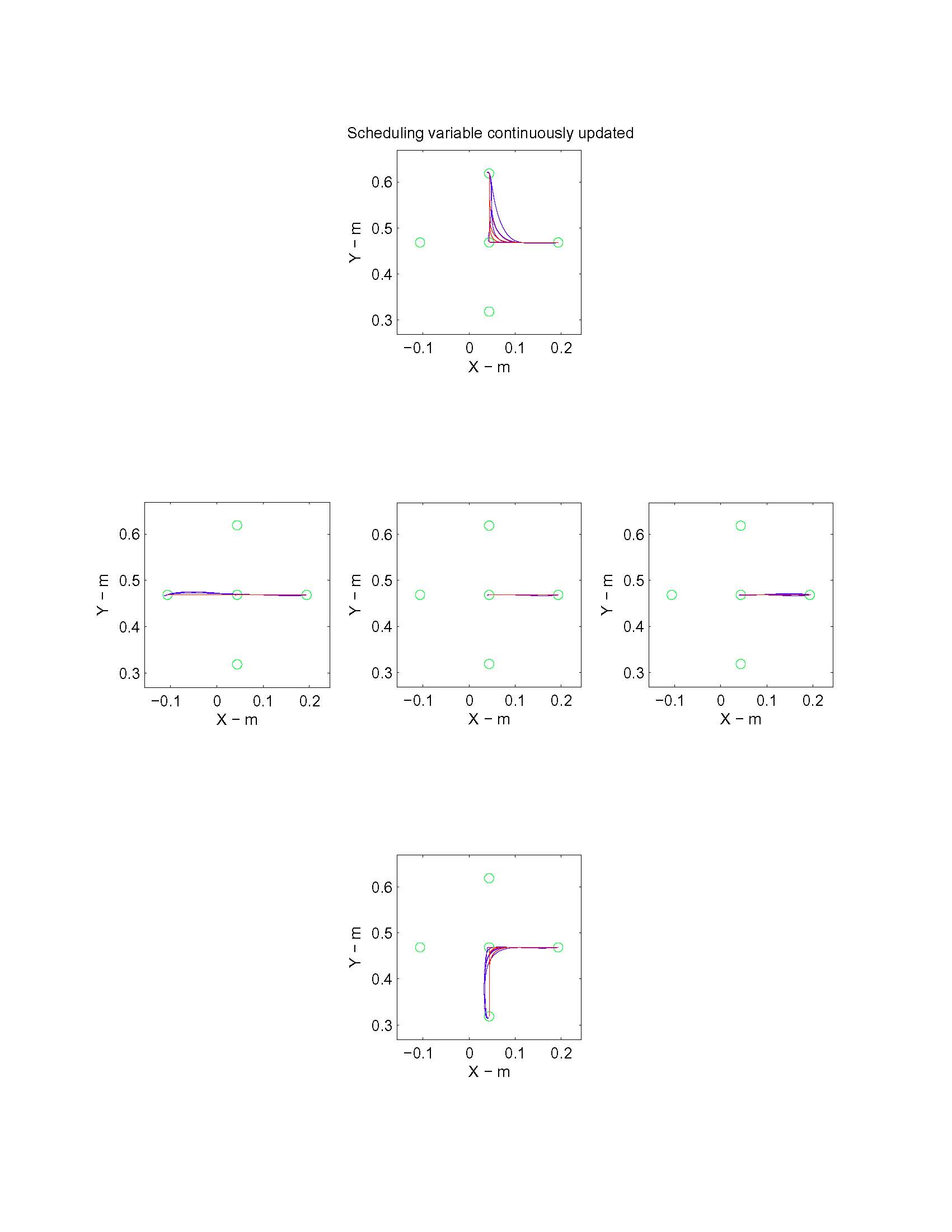
LPV Gainscheduling Arm Control Model for Human Double-Step TaskKazutaka Takahashi & Steve G. MassaquoiAbstractIn our recent work, the RICSS model [1] successfully captured known anatomical and physiological structures of cerebrocerebellar system and simple spike acclivity of individual Purkinje cells during manual circular tracking movements by a monkey. Furthermore it suggested that cerebrocerebellar system can be seen as a gainscheduling control system. In order to check feasibility of this idea, one gainscheduling scheme, a Linear Parameter Varying (LPV) [2] system is developed to perform real-time gainscheduling control. Furthermore, segmented command is supplied to investigate the effect of the feedforward command. The combined features of gainscheduling and feedforward segmented command managed to capture the human experimental data of double step tasks. This suggests the importance of sequential kinematic specification in motion planning and further support of gainscheduling control of cerebrocerebellar system suggested by the RICSS model. MethodsSeveral volunteer subjects participated in the experiment to perform a set of double-step tasks in a horizontal plane similar to that in [3]. Each subject held a handle of a manipulandum to move a cursor on a screen to reach a series of targets, and performed four blocks where a starting position within a block remained the same, one of the four locations, North(N), South(S), West(W), and East(E) 15 cm away from the Center(C). The first target was always at C. The order of the second target was randomized, but the number to N, S, W, and E was the same and half of that to C such that the total trials within a block was 120. The hand position was recorded and the hand velocity was obtained from those position data. ModelThe two-joint planar arm model used has a linear muscle model and excitation-coupling dynamics, but does not have any velocity dependent terms. Thus, the arm plant is modelled as an LPV model scheduled based purely on elbow angle. Given the size of the workspace, the minimum and maximum values of scheduling variables both of which are function of the elbow angle are computed. Then a set of local controllers around vortices of the polytope defined by the extreme points in scheduling variable space are designed based on H¥ criteria as in [2]. An instantaneous controller is a linear interpolation of the local controllers whose weights are determined by the fedback scheduling variables. Results and AnalysisThe left plots show a set of hand position data from one subject starting from E. Fairly stereotypical straight movement towards C is observed. As soon as the cue to the second target appears, the subject made a fairly smooth curve movements to N or S, while to W and E slightly concave movements are carried out. The right plots show a set of simulation result of the LPV model with segmented commands. This particular set of examples show that the simulation results capture the human data fairly well for most of the movements except for the ones to S. This direction is reported to be a difficult direction by the subject, and note that there are some trials in which the subject made a fairly large swirl-like deviations. The simplicity of the model could not capture this particular direction well.
Conclusion and Possible extensionsMotivated by RICSS model [1], cerebrocerebellar limb control system is realized as an LPV gainscheduling control system. The scheduling is done based on the limb state feedback as in RICSS model. Segmented reference command is supplied to the LPV system to capture the human data from the double step task. The combination of the segmented command with the LPV system can capture the human data reasonably well. Possible extensions include: 1) extension of parameter-varying control scheme to full RIPID model to investigate neuro-adaptive structure and algorithm, 2) investigation of the roles of feedforward reference signal and feedback state as scheduling variables, 3) investigation to extend the combined structure for more general complex movements, such as a circular tracking task in [4]. References:[1] K. Takahashi, A.V. Roitman, T.J. Ebner, and S.G. Massaquoi. A model of Purkinje cell simple spiking and cerebrocerebellar control during circular hand movement. submitted to Biol Cybern. [2] P. Apkarian, P. Gahinet and G. Becker. Self-scheduled H¥ control of linear parameter-varying systems: A design example. Automatica 31(9) pp.1251-1261, Sep, 1995. [3] T. Flash and E. Henis. Arm trajectory modifications during reaching towards visual targets. Journal of Cognitive Neuroscience , 3(3) pp.221--230, 1991. [4] A..V. Roitman, S.G. Massaquoi, K. Takahashi, and T.J. Ebner. Kinematic analysis of manual tracking in monkeys: characterization of movement intermittencies during a circular tracking task. J Neurophysiol, 91(2) pp.901--911, Feb, 2004. |
||||||
|