| Technical Reports | Work Products | Research Abstracts | Historical Collections |
![]()
|
Research
Abstracts - 2006
|
|
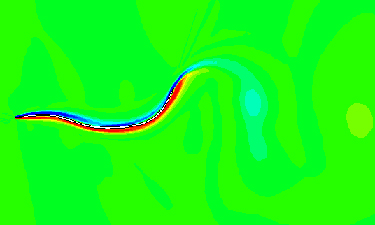
Control of Flexible Bodies in Viscous FlowsRick Cory, John Glowa & Russ TedrakeGoalOur goal is to understand the practical implications of unsteady fluid flows in the design of biomimetic under-water and aerial locomoting machines. Control systems should provide sufficient control authority over these flexible bodies through induced body-fluid energy exchanges without requiring an explicit fluid dynamic model. Problem Description and Proposed ApproachThe lack of analytical solutions to unsteady fluid flow problems has led to a large body of research in experimental fluid dynamics. Much of this work has concentrated on characterizing the extremely complex dynamics of unsteady fluid flow through implementation and analysis of table top experiments that lend themselves to nice flow visualizations. Two dimensional soap film experiments have played a key role in visualizing vortical flow patterns and near body flow characteristics and have served as a benchmark for comparison in computational fluid dynamics. Although these experiments have had a profound impact in our understanding of body-fluid interactions, we have yet to understand the fundamental issues in the control of flexible bodies immersed in a viscous flow. Attempts have been made at developing control systems for robotic fish that achieve outstanding propulsive efficiencies and high maneuverability. Despite the fact that simplifications were made in the design of these experiments, our understanding of controlling body-fluid energy exchanges still remains vague and the suboptimal maneuverability of these robots (compared to that of real fish) suggest that these problems are far from being solved. Recent advances in the areas of optimal control and machine learning have made this approach a prominent candidate for addressing such problems where the dynamics of the system become too difficult to model, yet locally optimal control solutions can still be achieved. A formulation using a model-free optimal control framework provides a fundamentally different approach to the body-fluid energy exchange problem that avoids explicitly defining a dynamic model while still achieving locally optimal behavior. Combining visualization techniques in experimental fluid dynamics along with model-free optimal control and machine learning provides a novel way of designing control systems for machines that are highly maneuverable in air and water. Technical ChallengesExperiment Design and Analysis. Experimental fluid dynamicists have adopted a number of ways to visualize the complex interaction between a moving fluid and an immersed body. These phenomena include boundary layers, leading and trailing edge vortices, vortex streets, wake generation, and turbulent flows. Realizing a control system for a body interacting with such complex dynamics requires developing experimental platforms that generate repeatable and quantifiable results. Additionally, these experimental platforms should help elucidate the relationship between our candidate reward functions and the corresponding hydrodynamic behaviors. Model-Free Learning. Currently, developing an invertible fluid dynamic model is impossible and relying on computational fluid modeling for online control remains intractable. In the context of fluid control, a robust control system should not rely on inaccurate dynamic models and should instead rely on trial and error interactions with its environment in such a way that it optimizes some short or long term scalar reward. In addition, dimensionality reduction techniques will play a key role in reducing the essentially infinite state space of the system into a compact representation that preserves the structure of the problem. Underactuated Control. As we concentrate less on strict kinematic control and move towards fluid-body interactions, our control algorithms should involve exploitation of intrinsic passive dynamics and efficient energy exchanges. Exploiting these interactions will become more relevant as we move from table top experiments to under-water and aerial locomotion, where high maneuverability heavily relies on efficient interaction with the surrounding fluid. MilestonesWe hope to obtain some understanding of the computational aspects of fluid dynamics through analysis of simple computational models. However, we plan on developing our control algorithms mostly through empirical studies and evaluations on real physical systems. The plan is outlined as follows:
In the long run, we hope that the results of this research will serve as an inspiration for creating robots that learn to mimic biological beings, both in physical agility and intelligence. References:[1] David Scott Barrett. Propulsive Efficiency of a Flexible Hull Underwater Vehicle. Ph.D. Thesis, MIT. 1996 [2] Benjamin Connell. Numerical Investigation of the Flow-Body Interaction of Thin Flexible Foils and Ambient Flow. Ph.D. Thesis, MIT. 2006. [3] Richard Mason. Fluid Locomotion and Trajectory Planning for Shape-Changing Robots. Ph.D. Thesis. California Institute of Technology. 2003. [4] M.A. Rutgers, X.L. Wu, and W.B. Daniel. Conducting Fluid Dynamics Experiments with Vertically Falling Soap Films. Review of Scientific Instruments, vol. 72,issue 7. (2001). [5] Russ Tedrake, Teresa Weirui Zhang, and H. Sebastian Seung. Stochastic Policy Gradient Reinforcement Learning on a Simple 3D Biped. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), volume 3, pages 2849--2854, Sendai, Japan, September 2004. [6] Jun Zhang, Stephen Childress, Albert Libchaber, and Michael Shelley. Flexible Filaments in a Flowing Soap Film as a Model for One-Dimensional Flags in a Two-Dimensional Wind. Nature, vol. 408, pages 835--839 (2000). |
|||
|