
| Technical Reports | Work Products | Research Abstracts | Historical Collections |
![]()
|
Research
Abstracts - 2006
|
|
Distributed Control Algorithms for Networked Mobile Robots with Sensory FeedbackMac Schwager, James McLurkin & Daniela RusIntroductionWe wish to develop distributed algorithms for networked teams of robots that self-organize in response to the sensed environment. Such networks promise the ability to collect information over distributed, large-scale domains with minimum infrastructure maintenance. This technology will enable scientific studies on geological and ecological scales previously prohibited by practical considerations, and provide tools for a host of security and surveillance applications. Thus far we have focused on the task of controlling the robots so that their configuration optimizes the sampling of a sensory function. We consider a group of robots that is dispatched over a bounded space of interest. The group's task is to sample a sensory function over the space. The sensory function is an unknown continuous scalar field that can be measured locally by the robots, such as light intensity, temperature, sound intensity, or chemical concentration. We have developed a decentralized control solution that can accomplish this task. Using sensory measurements and neighbor positions, the network self-organizes by positioning individual robots to optimize the measurement of the sensory function. This enables the network to record observations about the sensory environment with varying resolution, so that areas with larger sensory signals receive higher-density data observations than areas that are quiet. Our work builds on several important results in this area, notably [1]. New AlgorithmsWe have developed a control algorithm by which robots are caused to move to the weighted centroid of their Voronoi regions, a position that has been shown to be optimal for sensing [2]. For each robot, the control algorithm is as follows: 1. Compute the local Voronoi region. 2. Measure the value and gradient of the sensory function and compute a linear estimate of the sensory function using these measurements. 3. Compute the centroid of the Voronoi region using the estimated sensory function as a density. 4. Move in the direction of the centroid. 5. Repeat. In addition, techniques have been developed for the efficient computation of the above algorithm for implementation on platforms with limited computational resources. Stability and robustness of this algorithm is being investigated and the development of other algorithms is ongoing. Simulation Results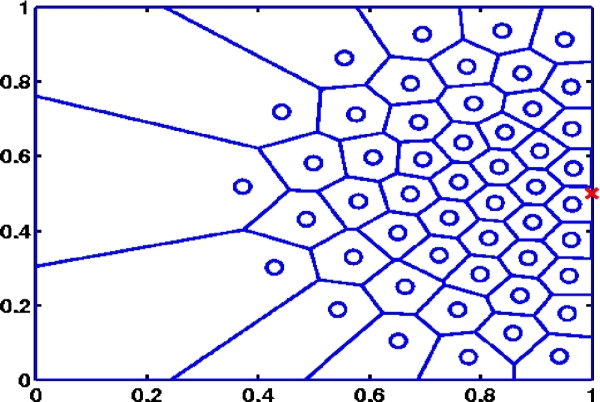 The algorithm has been tested in numerical simulation. An example of the final state of a typical simulation run is shown above. The red "x" denotes the center of a Gaussian sensory function, the circles represent robot positions, and the polygons show the Voronoi regions of the robots. Experimental Results
The algorithm has also been implemented and tested on a swarm of actual mobile robots. An example of the final state of a typical experiment is shown above. The robots use light sensors to measure the light source at the right of the region. References:[1] J. Cortes, S. Martinez & F. Bullo. Coverage Control for Mobile Sensing Networks. IEEE Transactions on Robotics and Automation, Vol. 20, No. 2, pp.243-255, April 2004. [2] Mac Schwager, James McLurkin & Daniela Rus. Distributed Coverage Control with Sensory Feedback for Networked Robots. Submitted to Robotic: Science and Systems, Philadelphia, PA, Aug. 16-19, 2006. |
|||
|