
| Technical Reports | Work Products | Research Abstracts | Historical Collections |
![]()
|
Research
Abstracts - 2006
|
|
Data-Driven Modeling and Control of Animal Group DynamicsMac Schwager & Daniela RusIntroductionThis project seeks to develop tools for automatically generating dynamical models and control strategies for groups of animals based on recorded tracking data. It is envisioned that the resulting techniques will be useful for modelling and controlling a broad class of biological group phenomena including cow herding, bird flocking, insect swarming, and human crowd behavior. Specific applications are numerous. Notably, these tools would enable the monitoring and control of groups of people to alleviate foot traffic congestion, or to identify anomalous behavior. They would also enable the control of livestock to minimize environmental damage from over-grazing. In addition, such methods could be directly useful for the control of groups of autonomous mobile robots. Methods from nonlinear control, system identification, and statistical learning theory are currently being adapted to these purposes. Model Description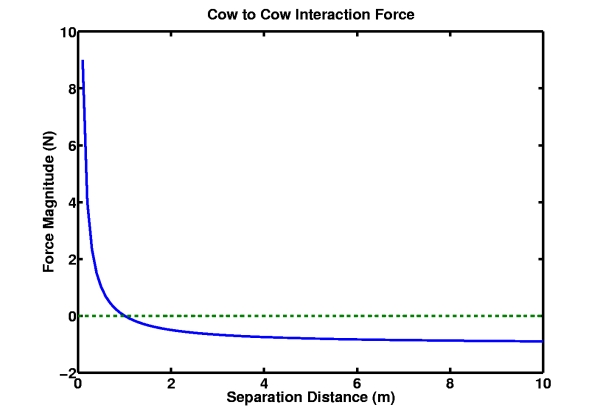
We have proposed a simple difference equation model with three important features. Firstly, each animal is given individual dynamics to enforce kinematic constraints and basic physical laws. Secondly, a force-like contribution is applied to each animal from its interaction with each of the other animals in its group. This force law is designed to accommodate a principle common to many multi-body dynamical systems: forces between bodies are repulsive at close distances and attractive at far distances (see above plot). Lastly, unknown elements of an animal's decision-motive processes are modelled as a force-like random disturbance. In the future we hope to incorporate a force-like contribution from the animal's interaction with its environment as well, to model behaviors such as obstacle avoidance. Systems Identification with Least Squares FittingThe model structure discussed above has the convenient property that it is linear in its unknown parameters. We use this fact to perform a least squares regression using measured data from real animals to estimate the unknown parameters. In the future we expect to categorize stretches of animal data into higher-level states using an unsupervised classifier. Each state will then have an associated set of regressed model parameters. We hope to model the transition among these higher-level states as a Markov model and identify the state-transition probabilities from the data using maximum likelihood techniques. ControlSeveral strategies exist for the control of multi-body dynamical systems [1], [2]. Specific control laws depend on what actuation is available. Experiments have been carried out on herds of cattle using collars that emit a sound to stimulate the animal's movement in a particular direction. Developing useful control actuators for groups of animals posses a significant practical challenge. References:[1] R. Olfati-Saber & R. M. Murray. Consensus Problems in Networks of Agents with Switching Topology and Time Delays. IEEE Trans. on Automatic Control, Vol. 49, No. 9, pp. 1420-1533, September 2004. [2] A. Jadbabaie, J. Lin & A. S. Morse. Coordination of Groups of Mobile Autonomous Agents Using Nearest Neighbor Rules. IEEE Trans. on Automatic Control, Vol. 48, No. 6, pp. 988-1001, June 2003. |
|||
|