| Technical Reports | Work Products | Research Abstracts | Historical Collections |
![]()
|
Research
Abstracts - 2006
|
|
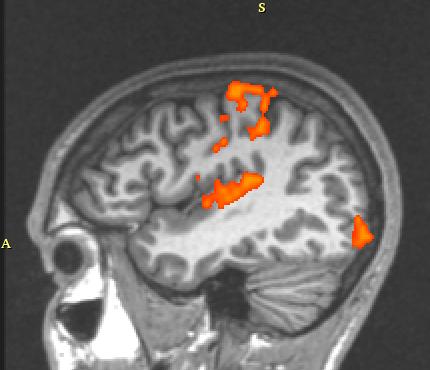
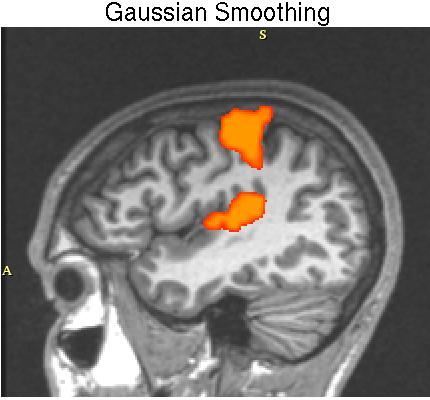
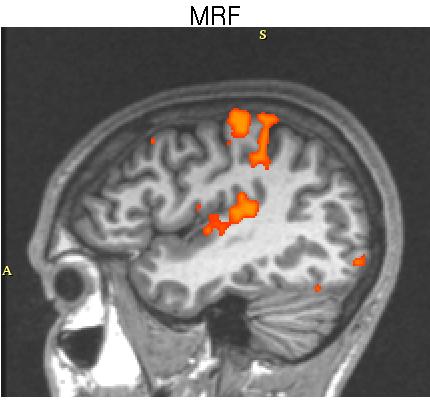
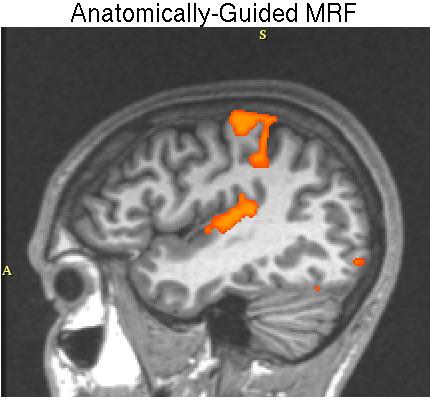
MRF-based Spatial Regularization Models in fMRI AnalysisWanmei Ou & Polina GollandBackground and ProblemFunctional magnetic resonance imaging (fMRI), developed based on the assumption that neural activation causes an increase in blood flow, is one of the most widely used imaging techniques to study brain functions. fMRI takes a series of 3D images over time in which the intensity values are proportional to the ratio of deoxyhemoglobin to oxyhemoglobin in the blood. This provides a discrete time signal for each voxel (the basic unit of a 3D image) with a sampling rate on the order of one second. With carefully designed psychological experiments, we can understand the neural basis of our behavior from simple to cognitively complex functions. Simple tasks include movement of fingers and basic sensory perceptions in response to stimuli based on presentation of light, tones, and syllables. More complicated tasks include face recognition, memory, and fear. The psychological experiments aim to associate one or more brain regions with a task the subject performs. Modeling brain activation based on fMRI has been an active research area since its development. A subject undergoes fMRI scans while alternating between performing tasks and resting. Bio-statisticians have developed various algorithms to create activation maps, indicating which locations of the brain are active corresponding to the stimulus presented to the subject. These algorithms, operating on each location of the brain separately, measure the difference in the signal obtained between the task and rest periods. The statistics computed by the algorithms are typically thresholded to create a binary map of the voxels that are significantly correlated with the stimulus in the experiment. Due to a low signal-to-noise ratio (SNR) in fMRI, such independent signal analysis leads to a number of scattered small islands in the resulting activation map. The small activations are then either removed through post-processing or ignored by the human interpreter. This approach reduces the accuracy of the result, and therefore is a crucial area which needs to be improved. Our SolutionAccording to fMRI image properties, neighboring locations tend to be at the same activation state. We can take advantage of this characteristic to reduce scattered activation islands. A common approach to reduce such false detections employs a Gaussian filter to smooth the fMRI signal prior to applying a detector. We refer to this process as Gaussian-smoothing-based detection. Unfortunately, Gaussian smoothing, though intended to combat low SNR, leads to a loss of detail in the resulting binary activation maps. Conventional image processing research has proved that Markov random field (MRF) can overcome this issue. We have adopted MRF as our spatial model. Inspired by atlas-based segmentation [2], we further improve on the MRF-based detector by incorporating spatial guidelines provided by anatomical images such as MRI. The spatial guidelines in our experiments are the segmentation labels from the same subject's MRI, including gray matter, white matter and others. It is known that activation most likely occurs in the gray matter. The goal is to integrate this information to achieve a higher detection rate. Intuitively speaking, we want the model to reflect the fact that activation is more likely to occur in gray matter than in white matter, and not at all possible in the bone. In addition, the spatial coherency of activation should be strong within each tissue but not across tissue boundaries. The extended MRF model encodes both tissue type and activation state. Reference [1] provides a detailed discussion of our models. ValidationIt is difficult to verify the model accuracy since the ground truth of brain activation is unknown. We therefore used simulated activations with a realistic noise model, extracted from true fMRI images, to study the behavior of MRF-based detectors at different noise levels. The true positive / false positive rate, also unknown as receiver operating characteristic (ROC) analysis, is the measurement of the detectors performance. When compared with Gaussian smoothing, the MRF-based detector achieves a ten percent higher true positive rate for a fixed false positive rate of 0.05%. The anatomically-guided MRF-based detector further improves the true positive rate by another five percent. Detailed results can be found in [1]. To further validate our proposed detectors we studied their ability to recover activation from significantly shorter time signals using real fMRI data (Fig.1). The main challenge of such validation is the lack of knowledge of ground truth. We compare the detection results on partial length time signals to the "pseudo ground truth" activation, created by majority voting of the detection results from four full-length sessions of fMRI experiments for the same subject. Our experiments show that the Gaussian-smoothing-based detector, with an 8 mm kernel, significantly over-smoothes the activation areas (c). It also fails to detect activations which occur in an elongated spatial pattern. In contrast, both the MRF-based detector (d) and the anatomically-guided MRF-based detector (e) capture activations with such spatial structure. This highlights the potential benefit of using the MRF model in fMRI detection. Furthermore, the anatomically-guided MRF-based detector produces activation maps that follow closely the highly folded cortical sheet. Our experiments demonstrate that employing the anatomically-guided MRF model lead to high detection accuracy from time signals of substantially reduced length.
Figure 1. Activation maps, sagittal slice. (a) Pseudo ground truth generated from majority voting of the detection results from 4 full-length sessions of fMRI experiments. (b)-(e) The activation maps obtained from the first one-third of the original time signal from one session: (b) Without spatial smoothing, the activation map is fragmented with many false detections. (c) Isotropic Gaussian smoothing leads to an over-smoothed activation map. (d) After incorporating the MRF spatial model, the activation map is less fragmented compared with (b). (e) The activations match closely the highly folded cortical surface. The anatomically-guided MRF-based detector produces the best result in terms of pseudo ground truth recovery. AcknowledgementsThis work was partially supported by the NIH National Center for Biomedical Computing Program, National Alliance for Medical Imaging Computing (1U54 EB005149) and NCRR FIRST-BIRN (P41RR14075). Wanmei Ou is also partially supported through an NSF graduate fellowship. References[1] Ou, W. and Golland, P. From Spatial Regularization to Anatomical Priors in fMRI Analysis. In Proc. IPMI'05, July 2005. [2] Pohl, K., et al. Incorporating Non-rigid Registration into Expectation Maximization Algorithm to Segment MR Images. In Proc. MICCAI'02, pp. 564-572. 2002. |
|||||||||||
|