| Technical Reports | Work Products | Research Abstracts | Historical Collections |
![]()
|
Research
Abstracts - 2006
|
|
Intelligent Human Detection for Night-Vision SystemY. Fang, I. Masaki & B.K.P. HornOur objective is to apply machine vision techniques to develop a new generation of night-vision system with intelligent human detection and identification function. Currently, more and more infrared-based night-vision systems are mounted on the vehicles to enhance drivers' visual ability, which does allow drivers to see better, but it also introduces new safety concerns. Drivers need to switch their attention between windshield and separate infrared-display screen. Specifically for senior drivers, it is still difficult for them to identify any abnormal scenario or potential danger in its early stage. For safety purposes, intelligent human detection and identification system based on infrared-video sequences is expected to automatically track pedestrians' location, and to detect any potential dangers based on targets' action in monitored environment. Compared with conventional shape-based pedestrian detection, our new ``shape-independent'' detection methods include the following two innovations. First, we propose an original ``horizontal-first, vertical-second'' segmentation scheme that first divides infrared images into several vertical image stripes, and then searches for pedestrians only within these image stripes. Second, we have defined unique new shape-independent multi-dimensional classification features. We demonstrated the similarities of these features among pedestrian image regions with different poses, as well as the differences of these features between pedestrian and non-pedestrian regions of interest (ROI). Our preliminary test results based on limited sample images were very encouraging in terms of reliability and accuracy when detecting pedestrians with arbitrary poses. Our overall goal is to design systems for future transportation systems to make driving safer and less stressful for all travelers regardless of age and disability.

Figure 1: Four pedestrian-detection results in a sequence.
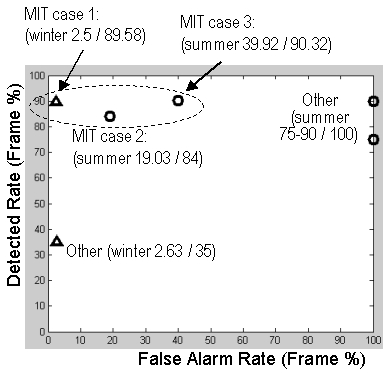
Figure 2: Preliminary results with limited samples. References:[1] Yajun Fang, Keiichi Yamada, Yoshiki Ninomiya, Berthold Horn, and Ichiro Masaki. Comparison between infrared-image-based and visible-image-based approaches for pedestrian detection. In Proceedings of the IEEE Intelligent Vehicles Symposium, pp. 505--510, 2003. [2] Fang, Y., K. Yamada, Y. Ninomiya, B. Horn and I. Masaki. A Shape-Independent-Method for Pedestrian Detection with Far Infrared-images. In Special issue on "In-Vehicle Computer Vision Systems" of IEEE Transactions on Vehicular Technology, pp.1679-1697, Vol.53, No.6, Nov. 2004. |
|||
|