| Technical Reports | Work Products | Research Abstracts | Historical Collections |
![]()
|
Research
Abstracts - 2006
|
|
Interactive Character Animation of Dynamic ManipulationYeuhi Abe, Zhunping Zhang & Jovan Popović
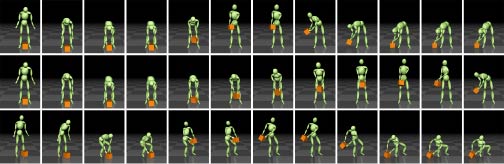
IntroductionLifelike animation of manipulation must account for the dynamic interaction between animated characters, objects, and their environment. Failing to do so would ignore the often significant effects objects have on the motion of the character. For example, lifting a heavy object would appear identical to lifting a light one. Physical simulation handles such interaction correctly, with a principled approach that adapts easily to different circumstances, changing environments, and unexpected disturbances. Thus, the goal of our work is to control lifelike animated characters so that they accomplish manipulation tasks within an interactive physical simulation. ProgressWe have developed a new multi-task control algorithm that simplifies descriptions of manipulation by supporting prioritized goals in both the joint space of the character and the task-space of the objects being manipulated [1]. The algorithm borrows heavily from recent advances in the control theory for anthropomorphic robots, making it applicable to physical robots as well as animated characters. The end result is a versatile technique that incorporates realistic force limits and recorded motion postures to portray lifelike animation of manipulation automatically. ResultsUsing our simulation and control framework, we can create arbitrary animations of characters manipulating objects. For instance, we have created animations of characters lifting, tossing, and catching objects. Since the characters are physically simulated, dynamic motion effects emerge naturally, such as a proper response the weight of the object being manipulated and reactions to unexpected collisions with objects. For example, an animation of a character lifting a heavy object will proceed slower than the same animation for a lighter object due to explicit limits on the force the character is allowed to use to lift the object. (See Figure 1) Similar non-linear effects are observed when manipulating fast moving objects. Future Work
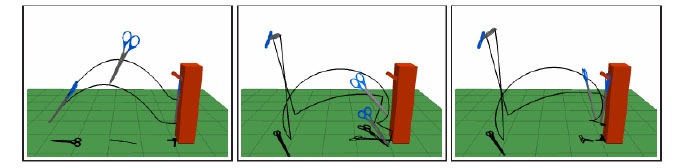
Our goal is to control the animation of lifelike characters as they accomplish even more complex dynamic manipulation tasks such as dribbling a basketball, interacting with each other, or locomoting. (Locomotion can be thought of as complex manipulation, where the character manipulates itself through the environment.) Previous work has shown how to control complex simulation of passive objects (e.g., simple rigid bodies like scissors. See figure 2.) so that they meet animator specified constraints [2]. We hope to build upon this work to control both passive objects and active characters simultaneously within our simulation and control framework. References:[1] Yeuhi Abe and Jovan Popović. Interactive Animation of Dynamic Manipulation. Technical Report (TR-2006-012), MIT CSAIL (2006). [2] Jovan Popović, Steven M. Seitz, Michael Erdmann, Zoran Popović, Andrew Witkin. Interactive Manipulation of Rigid Body Simulations. In Computer Graphics (Proceedings of SIGGRAPH 2000), ACM SIGGRAPH, Annual Conference Series, pp. 209-217. |
|||||
|