
| Research Abstracts Home | CSAIL Digital Archive | Research Activities | CSAIL Home |
![]()
|
Research
Abstracts - 2007
|
|
AMOUR (Autonomous Modular Optical Underwater Robot)Iuliu Vasilescu, Carrick Detweiler & Daniela Rus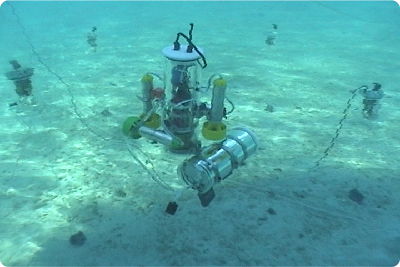 We designed, developed and deployed an underwater sensor network capable of multi-modal perception, dual communications and mobility in the ocean. The hardware consists of static sensor network nodes and mobile robots that are dually networked: optically for point-to-point transmission at 300kb/s and acoustically for broadcast communication over hundreds of meters range at 300b/s. We have demonstrated the system during experiments with this system in the ocean, in rivers, and in lakes. Sensor Network Supporting Dual Communications The sensor nodes, which were developed in our lab, package communication, sensing, and computation in a cylindrical water-tight container of 6in diameter and 10in height. Each unit includes an acoustic modem we designed and developed. The system of sensor nodes uses a self-synchronizing distributed TDMA protocol. The system is capable of ranging and has a data rate of 300 b/s verified up to 300meters in fresh water and in the ocean. Each unit also includes an optical modem implemented using green light. The sensors in the unit include temperature, pressure, and camera with inputs for water chemistry sensors. Because the nodes are light and small, they are easily deployed by manually throwing them overboard. Once deployed, the nodes are anchored with weights and form a static underwater network. This network self-localizes using a range based 3D distributed localization algorithm[1]. Robot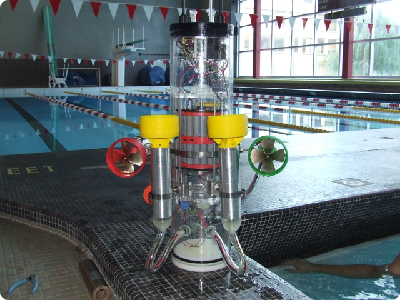 The underwater sensor network supports mobile nodes such as our underwater robot called the Autonomous Modular Optical Underwater Robot (AMOUR). It is 11kg. with a maximum speed of 1m/s. It has a battery life of 5 hours. The robot has all of the capabilities of the sensor boxes as well as a more advanced camera system for use in local obstacle avoidance. One of the design goals of the robot was to be inexpensive, so it has a custom-built inexpensive inertial measurement unit (IMU). We rely on the IMU for pose control and the range measurements we obtain to the sensor nodes to determine its trajectory through the water. The IMU as well as the control systems of the robot were developed in conjunction with Jan Stumpf and Daniel Gurdan from the Technical University of Munich[7,8]. The job of the robot is to travel around and download data from the senor nodes. Additionally it gives the network dynamic sampling capabilities. If an event is happening of interest the robot can move to that area to provide denser sensor sampling. We envision having many robots in the final system to provide highly dynamic sampling and faster download of the data from the static nodes. Localization and Tracking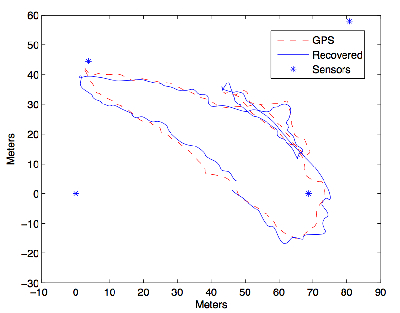 To be able to find the sensor nodes the robot must know precisely where it is at all times. A passive localization and tracking algorithm we developed[2] has been implemented on this sensor network system and used to localize and track the moving robot. We have deployed the sensor nodes and the robot in the ocean (Moorea, French Polynesia [3]), in the river (Charles River, MA) and in a lake (Otsego, NY) and collected extensive networking and localization data for this system. Our experiments verify the theoretical predictions. We have performed extensive communication, networking, localization and tracking experiments with four sensor nodes localizing and tracking the AMOUR robot at Lake Otsego in New York State during September, 2006. Data was collected during a run of the passive location algorithm over an 80 by 80 meter area of the lake that is 20 meters deep. The nodes were deployed to float between 3 and 5 meters below the water surface. The figure to the left shows the results. The nodes were localized using our distributed localization algorithm. AMOUR moved autonomously across this area on the surface of the water. It collected both GPS and range information by acoustic messaging as it moved. This data was then used to locate and track the position of the robot. We commanded the robot to move using its entire speed range during this experiment. The mean location error for AMOUR was 2.5 meters (which is less than the accuracy of the GPS unit we used). Over a period of an hour there were a total of 1700 messages transmitted acoustically across the network formed by the sensor nodes and the robot. The overall success rate for message transmission was 56%. References:[1] David Moore, John Leonard, Daniela Rus, and Seth Teller. Robust distributed network localization with noisy range measurements. In Proc. 2nd ACM SenSys, pages 50--61, Baltimore, MD, November 2004. [2] Carrick Detweiler, John Leonard, Daniela Rus, and Seth Teller. Passive mobile robot localization within a fixed beacon field. In Proc. of the 2006 International Workshop on Algorithmic Foundations of Robotics, New York, August 2006. Springer-Verlag. [3] Peter Corke, Carrick Detweiler, Matthew Dunbabin, Michael Hamilton, Daniela Rus, and Iuliu Vasilescu. Experiments with Underwater Robot Localization and Tracking. In Proceedings of the International Conference on Robotics and Automation, Roma, Italy, April 2007. [4] Matthew Dunbabin, Iuliu Vasilescu, Peter Corke, and Daniela Rus. Experiments with Cooperative Control of Two Autonomous Underwater Vehicles. In Proceedings of the 2006 International Symposium on Experimental Robotics, July 2006. [5] Iuliu Vasilescu, Keith Kotay, Daniela Rus, Peter Corke, Matthew Dunbabin. Data Collection, Storage and Retrieval with an Underwater Optical and Acoustical Sensor Network. In Proceedings of ACM Sensys 2005, November 2005. [6] Matthew Dunbabin, Iuliu Vasilescu, Peter Corke, and Daniela Rus. Data Muling over Underwater Wireless Sensor Networks using an Autonomous Underwater Vehicle. In Proceedings of the 2006 International Conference on Robotics and Automation, May 2006. [7] Jan Stumpf. Design and Motion Planning of an Autonomous Underwater Vehicle. Diploma Thesis, Technical University of Munich and Massachusetts Institute of Technology, January 2007. [8] Daniel Gurdan. Design and Motion Planning of an Autonomous Underwater Vehicle. Diploma Thesis, Technical University of Munich and Massachusetts Institute of Technology, January 2007. |
|||
|