| Research Abstracts Home | CSAIL Digital Archive | Research Activities | CSAIL Home |
![]()
|
Research
Abstracts - 2007
|
|
ShadyMarsette Vona, Carrick Detweiler, Keith Kotay & Daniela Rus
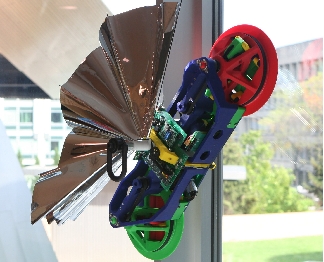
We work in the new Stata Center building at MIT in a room with a large wall-window which currently has no shades. As many of our desks are directly next to this window we needed some means to block the light from hitting our computer screens. Instead of traditional shades which would block the whole window, detracting from the view, we have decided to build a robot which can climb on the window's aluminum frame. It can thus be positioned on the window to be a localized sunshade. While many climbing robots have been developed, only a few climb on thin-member truss-like structures. Shady [1, 2] tests some new ideas in design and control, in particular, using mechanical compliances and associated proprioception, and was experimentally verified to be over 99.8% robust over many hours of climbing. Truss Climbing
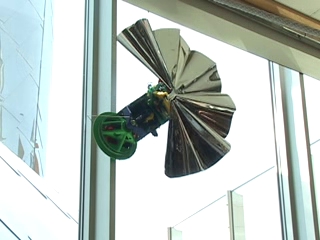
The frame of the window (yellow lines) is composed of rigid aluminum members, each about 1 inch wide. Shady climbs by a sequence of grip and swing motions, and can climb bars in any orientation. The grippers cannot close at locations where bars intersect, but the need for that can be avoided by starting Shady at an appropriate location. Truss structures are familiar to most of us: railroad bridges, construction scaffolding, and radio towers are common examples. Many structures built in space, for example on the international space station, are also essentially trusses. While most trusses are currently assembled and maintained by humans, it may be advantageous in some cases to have a robot which can climb about the truss to deliver tools and materials, or perhaps to inspect or even assemble new parts of the truss. While many structure climbing robots have been developed, most do not address the case of climbing on trusses. It can be argued that the penalties for uncertainty are higher when climbing a thin-member truss structure than for some other types of climbing, such as climbing the broad flat surface of a building. In particular, as the robot extends a gripper towards a thin structure it may easily approach misaligned, or even miss the structure completely. Sun Shading and Other ApplicationsShady incorporates a deployable sun shade as a demonstration payload:
Other truss climbing robots could carry tools, materials, or inspection equipment. We are most interested in the science and engineering questions related to achieving robust truss climbing. As an example application, Shady carries a deployable sun-shade which can block glare for individuals in our lab. Placement of the shade of course depends both on the geometry of incoming sunlight and on the location of the shade target in the lab. Currently Shady's location is manually specified by clicking on a representation of the window frame. In the future we may attempt to automate this process. Other applications for truss climbing robots could include
Compliance and ProprioceptionThis version of the Shady hardware incorporates two kinds of intentional mechanical compliance. First, the two rotation actuators are mounted on springs which permit about +/-3° of passive rotation. Second, there is a hinge at the center of the robot which also permits about +/-3° of rotation of one gripper with respect to the other, about an axis perpendicular to the gripper rotation axes. Importantly, sensors are included to measure the motion at all compliances. In effect, these sensors give the robot a proprioceptive sense whereby it can measure the compliant motion at its own joints induced by the robot's interaction with the environment (both the window frame and gravity). In tests it appears this capability is quite important to ensuring robust operation. In many cases when the robot closes a gripper it is initially misaligned with respect to the window frame. The compliances allow the robot to move as needed to conform to the actual local geometry, and the sensing then enables the robot to know how it moved so that it may actively adjust itself to fit that geometry with minimal internal strain. More details on the implementation and use of compliance and proprioception in this version of Shady are given in our ISER 2006 paper [1]. The motors which rotate Shady's grippers are mounted on springs which permit about +/-3° of passive sensed rotation:
One way we use the gripper rotation springs is to implement an active compliance mode: even small external forces are detectable as spring deformations, and the rotation motors are actively engaged to permit the indicated movement. This is convenient for physically configuring the robot. More importantly, the springs allow Shady to move slightly each time it closes a gripper, thus conforming the robot to the window frame and accounting for misalignments:
In tests this capability seemed crucial to achieving 99.8% reliability over many hours of climbing. A passive central hinge permits about +/-3° of sened movement, which serves to bias the unconnected gripper towards the window frame:
Linkage-Based Grip MechanismOne of the largest engineering challenges for Shady is the design of the grip mechanisms. The window frame geometry does not permit an enveloping grip, and we don't want to modify it. Thus Shady can only grip the parallel sides of the window frame beams. We designed a symmetric linkage mechanism to rotate the grip pads to closure:
Each half of the mechanism is a pair of coupled four-bar linkages, and each of those approaches a kinematic singularity as the gripper is closed. This gives a high gripping force and virtually eliminates backdriveability. The latter is important both for energy considerations, as no backdriveability means that the grip motors can be left de-energized without fear of the gripper opening, and also for safety, since an unplanned loss of power will not cause the robot to lose its grip. In testing we found that the choice of grip pad material was critical to avoiding slippage. Currently we use thin sheets of silicone rubber which provide a large amount of stiction against the aluminum window frame without compressing very much. Finally, we found that closing the gripper on the window frame often results at first in an offset grip. At this point the robot uses its proprioceptive sensors to detect its actual configuration, and then actively adjusts itself to relieve most internal stress. The gripper is then re-opened partially, allowing it to snap down fully onto the window frame, and then closed a second and final time. More details on the grip mechanism are given in our ISER 2006 paper [1]. Research ContextSeveral truss climbing robots have been explored by other groups, e.g. Staritz et al's "Skyworker" [3], Amano et al's handrail-gripping robot for firefighting [4], Nechba, Xu, Brown et al's "mobile space manipulator SM2" [5], Kotay and Rus' "Inchworm" [6], and Almonacid et al's parallel mechanism for climbing on pipe-like structures [7]. Our work with Shady explores a new mechanical design and novel control using intentional mechanical compliances and proprioception, with experimentally confirmed robustness. Experimental ResultsWe performed over 10 hours of measured climb tests with this version of the Shady hardware, comprising over 1296 individual grip/ungrip/rotate movements, and including several long uninterrupted climbs. Only two non-dangerous faults were observed in all this testing, yeilding a reliability rate of over 99.8%. This testing is described in more detail in our ISER 2006 paper [1]. SimulationWe have created a basic kinematic simulator for Shady, which has enabled us to develop and debug many algorithms used in shady operation. You can try it out online here. Next StepsIn addition to exploring options for making Shady automatically know where to locate itself to shade a member of our lab, we are working on an extension of the Shady design to climbing on 3D trusses, and the concept of using many instances of Shady-like modules to form a self-reconfiguring truss robot system. References:[1] Marsette Vona, Carrick Detweiler, and Daniela Rus. Shady: Robust Truss Climbing With Mechanical Compliances. In International Symposium on Experimental Robotics, 2006. [2] Carrick Detweiler, Marsette Vona, Keith Kotay, and Daniela Rus. Hierarchical Control for Self-assembling Mobile Trusses with Passive and Active Links. In The Proceedings of IEEE Intl. Conf. on Robotics and Automation, pp. 1483–1490, Orlando, FL, USA, May 2006. [3] Peter J. Staritz, Sarjoun Skaff, Chris Urmson, and William Whittaker. Skyworker: A robot for assembly, inspection and maintenance of large scale orbital facilities. In IEEE ICRA, pp. 4180–4185, Seoul, Korea, 2001. [4] Hisanori Amano, Koichi Osuka, and Tzyh-Jong Tarn. Development of vertically moving robot with gripping handrails for fire fighting. In IEEE/RSJ International Conference on Intelligent Robots and Systems, pp 661–667, Maui, HI, 2001. [5] Michael Nechyba and Yangsheng Xu. Human-robot cooperation in space: SM2 for new space station structure. In IEEE Robotics and Automation Magazine 2(4), pp. 4–11, Dec. 1995. [6] Keith D. Kotay and Daniela L. Rus. Navigating 3d steel web structures with an inchworm robot. In IEEE International Conference on Intelligent Robots and Systems, 1996. [7] M. Almonacid, R. J. Saltaren, R. Aracil, and O. Reinoso. Motion planning of a climbing parallel robot. In IEEE Transactions on Robotics and Automation 19(3), pp. 485–489, 2003. |
||||||
|