
| Research Abstracts Home | CSAIL Digital Archive | Research Activities | CSAIL Home |
![]()
|
Research
Abstracts - 2007
|
|
Real-Time Enveloping with Rotational RegressionRobert Wang, Kari Pulli & Jovan Popović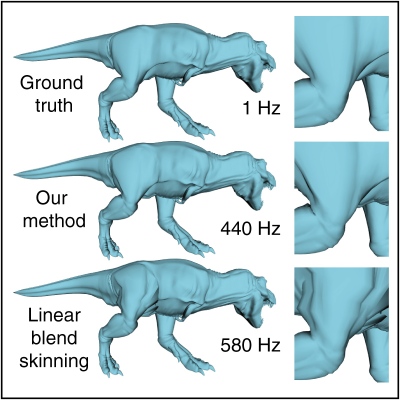
IntroductionEnveloping (or skinning) is the process that relates a skeleton, which an animator controls, to a 3-D surface mesh, which the audience sees. This process is necessary in most computer graphics applications that involve animated characters. The complexity (and speed) of enveloping solutions vary from photo-realistic muscle simulations used for movie production, to artifact-ridden heuristics such as linear blend skinning used for video games and training simulations. We propose a method for example-based enveloping of 3-D characters. We can approximate the output of muscle simulations or other high-quality enveloping tools with a model that can be evaluated at speeds comparable to the fastest enveloping techniques. Our technique introduces a rotational regression model that can accurately capture common skinning behaviors such as muscle bulging, twisting, and challenging areas such as the shoulders. Our better treatment of rotational quantities is made possible by a framework that predicts mesh deformation gradients instead of mesh vertex positions. We reconstruct the vertex positions from deformation gradients in an additional step by solving a Poisson equation. We show that our model is significantly more expressive than linear blend skinning and capable of capturing a wider variety of effects without generalization problems. Our method is also comparable in run-time speed to linear blend skinning. All in all, we are proposing a more general, less artifact-ridden, replacement for linear blend skinning that will allow for more realistic enveloping in real-time applications. Technique Overview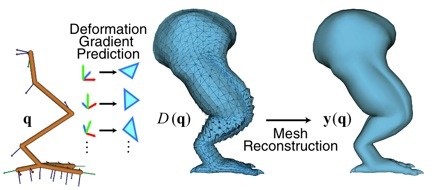
Our model maps a skeletal pose q to its corresponding mesh pose y(q). The mappign has two steps. First, we predict deformation gradients of the mesh based on the skeletal pose. We then reconstruct vertex positions from these predictions by solving a Poisson equation. Preliminary Results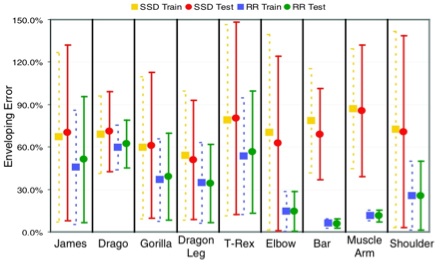
Our errors are not only generally lower than linear blend skinning (SSD), but their standard deviations (error-bars) are smaller as well, meaning that the errors are harder to detect visually. All errors are normalized so that 100% correpsonds to the best rigid-articulated body predictor for each example. Both approximation error (dotted line) and generalization error (solid line) for both SSD and our rotaiotnal regression method (RR) are shown above. References:[1] Robert Y Wang Real-Time Enveloping with Rotational Regression Masters Thesis, February 2007. |
|||
|