| Research Abstracts Home | CSAIL Digital Archive | Research Activities | CSAIL Home |
![]()
|
Research
Abstracts - 2007
|
|
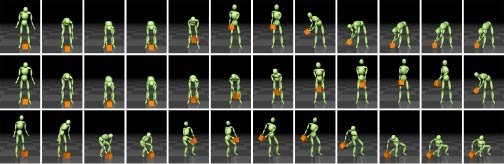
Control of Simulated CreaturesYeuhi Abe, Marco da Silva & Jovan PopovićIntroductionAnimated characters, such as humans, animals, and robots, are typically at the center of attention in the virtual worlds they inhabit. The quality of their motion is one of the most important details in compelling animation, especially for interactive applications such as computer games and training simulations. Characters that move in response to their environment with intention and grace will enhance applications by immersing viewers in a palpable experience. In contrast, characters that move in an artificial or scripted manner will detract from the realism of the virtual world, making applications less effective. A general solution to "on the fly" synthesis of character animations for interactive applications has yet to be discovered. This is because interactivity significantly complicates the task of generating character animations. Unlike static animation (e.g., in movies), interactive characters must react in realistic and intelligent ways in response to the actions of the user and the surrounding environment. Physical simulation offers one promising approach to resolving this problem. But the use of physical simulation for the animation of active characters has stalled due to the significant difficulty of developing control policies that compute the equivalent of muscle forces in Nature, which guide the characters through desired motion sequences. As a result, most current animation systems either simulate characters as passive rag dolls or play back pre-recorded motions that ignore dynamics completely. Neither solution allows for the level of realism that will be expected from the next generation of interactive applications. ProgressWe have developed two new control algorithm: prioritized control [1] and multiobjective control [2]. Both simplify the process of directing physically simulated characters by decoupling the description of motion from the computation of physical control parameters. Prioritized control is faster, but cannot handle unilateral contact with the environment. Multiobjective control is slightly slower but it allows for handling of arbitrary unilateral contact with the environment as well as more flexibility in motion specification. ResultsObject ManipulationUsing prioritized control we have created animations of characters lifting, tossing, and catching objects. Since the characters are physically simulated, dynamic motion effects emerge naturally, such as a proper response to the weight of the object being manipulated and reactions to unexpected collisions with objects. For example, an animation of a character lifting a heavy object will proceed slower than the same animation for a lighter object due to explicit limits on the force the character is allowed to use to lift the object. (See Figure 1) Similar effects are observed when manipulating fast moving objects or when force disturbances are added while the character is holding an object.
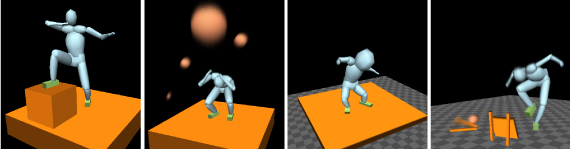
Dynamic BalancingUsing multiobjective control we have created several interactive simulations of a character executing motions while maintaining balance, despite significant disturbances in the environment. (See Figure 2) These disturbances include collisions with moving objects, forces applied by a user, and random motions of a moving platform on which the character is standing.
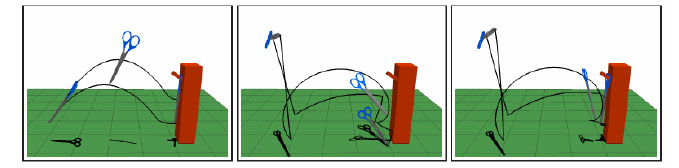
Future WorkOur goal is to control the animation of lifelike characters as they accomplish even more complex dynamic manipulation tasks such as dribbling a basketball, interacting with each other, or locomoting. Previous work has shown how to control complex simulation of passive objects (e.g., simple rigid bodies like scissors. See figure 3.) so that they meet animator specified constraints [3]. We hope to build upon this work to control both passive objects and active characters simultaneously within our simulation and control framework.
References:[1] Yeuhi Abe and Jovan Popović. Interactive Animation of Dynamic Manipulation. ACM/EUROGRAPHICS Symposium on Computer Animation. 2004. [2] Yeuhi Abe. (2007) Towards Adaptive and Directable Control of Simulated Creatures. Masters Thesis, MIT, February 2007. [3] Jovan Popović, Steven M. Seitz, Michael Erdmann, Zoran Popović, Andrew Witkin. Interactive Manipulation of Rigid Body Simulations. In Computer Graphics (Proceedings of SIGGRAPH 2000), ACM SIGGRAPH, Annual Conference Series, pp. 209-217. |
|||||||
|