
Shady: A Robotic Sunshade
Carrick Detweiler, Alex Hornstein, Keith Kotay, Peter Osagie, Daniela
Rus, Paulina Varshavskaya, Iuliu Vasilescu,
Marsette A. Vona, Justin Werfel & Yeoreum Yoon
Shady
We work in the new Stata Center building in a room with a large wall-window (about 4m tall and 8m wide) which currently has no shades to block sunlight. As many of our desks are directly next to this window we needed some means to block the light from hitting our computer screens. Instead of traditional shades which would block the whole window, detracting from the view, we have decided to build a robot which can climb on the window's aluminum muntins. It can thus be positioned on the window to be a localized sunshade and will be able to dynamically track the sun throughout the day.
Hardware
We are developing a four degree of freedom robot to climb around on the lattice formed by the window muntins. The robot is symetric, with two barrels that have a rotational degree of freedom, and each barrel contains a one degree of freedom gripper which is able to grab onto a muntin. Below is an image of the prototype.

Prototype of the four degree of freedom Shady robot with hand fan used
as shade.
In addition to the four degrees of freedom used for motion, the robot will also be able to deploy a hand fan as seen above. This will allow the robot to move into the desired shading location with the minimum impact on the aesthetics of the window. When it reaches the desired location the shade can be deployed.
We are using a variety of hardware and electronics in the Shady prototype. Most of the hardware has been custom designed. We are using a Sharp Zaurus for high level control and interface the Zaurus with a stack of Acroname Brainstems for lower level sensing and motor control.
Planning and Control
Given a Shady robot and a system of muntins, we would like for Shady to position itself in an optimal spot for shading. This requires the traversal of the lattice formed by the muntins to goto and maintain the optimal location which will possibly be changing as the outside lightning conditions change. We developed a planning and control system that synthesizes the primitive Shady steps needed to move from region A to region B on muntins. We have implemented this in the Shady Simulator. This allows us to test the algorithms we develop in simulation before using them on the actual hardware. The simulator and hardware platform share a large portion of the code base, allowing easy porting of algorithms.
One such algorithm we have developed is a Path Planner that finds the shortest path from its current location to a desired goal point. Below is a screen shot of the path finder.
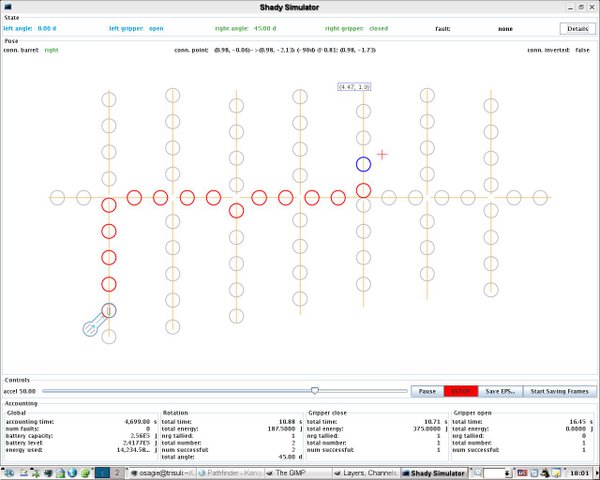
Image showing all possible Shady gripper points in the environment within
a given search radius (light blue), the shortest path (red), and the goal
point (blue).
The user interacts with the planner by specifying a desired target point. This is done in the simulator by clicking the mouse somewhere in the environment. The path finder employs a breadth-first search to generate a graph representation of the possible Shady gripper points in the environment. It then uses Dijkstra's to find the shortest path given the selection of points. It is interesting to note that it is possible that the path that gets Shady closest to the desired point will not always be the shortest distance path due to the kinematic structure of Shady. Furthermore, in environments with muntins only intersecting at right angles, there are only a finite number of points at which the barrel of a Shady can be attached.
Currently the planner is limited to 2D, however, it will be extended in the future to work in arbitrary environments such as the 3D extension of the Shady concept presented in [1].
Cooperative Shading
We are also exploring ways in which Shadys can cooperate to improve shading. If there are multiple locations that need to be shaded a group of Shadys must decide which Shady should be assigned to which Shady location. This planning process must take into consideration the fact that paths my be blocked by other Shadys that are moving to a different shading location or others that are actively shading. Additionally, there may be some situations where multiple Shadys may be needed to shade a single location. In this case care must be taken to avoid collisions. We are also exploring the case where multiple Shadys can join together to form a unit modular self-reconfigurable robot in [1].
Research Support
NSF and Intel.
References:
[1] Carrick Detweiler, Alex Hornstein, Keith Kotay, Peter Osagie, Daniela Rus, Paulina Varshavskaya, Iuliu Vasilescu, Marsette A. Vona, Justin Werfel, and Yeoreum Yoon. MultiShady: A Bipartite Heterogenous Unit Modular Self-Reconfigurable Robot. In CSAIL Research Abstracts, 2005.
The Stata Center, Building 32 - 32 Vassar Street - Cambridge, MA 02139 - USA tel:+1-617-253-0073 - publications@csail.mit.edu (Note: On July 1, 2003, the AI Lab and LCS merged to form CSAIL.) |