| Research Abstracts Home | CSAIL Digital Archive | Research Activities | CSAIL Home |
![]()
|
Research
Abstracts - 2007
|
|
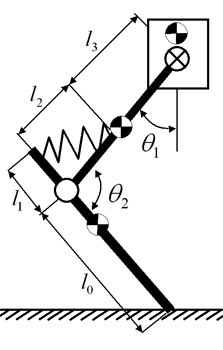
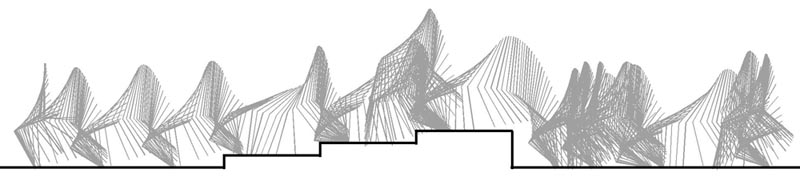
Optimization of Motor Control in Underactuated Legged LocomotionFumiya Iida & Russ TedrakeIntroductionThere has been an increasing interest in the use of passive dynamics to achieve energy efficient and rapid movement of robotic systems. It was shown, for example, that bipedal walking can be very efficient when robots exploit physical body dynamics [1]. While most of the underactuated legged robots are functional only in relatively simple environment (e.g. flat ground or terrain with small gaps), it is a highly challenging problem to control them in rough environment. This project investigates mechanical designs and optimization processes of legged robot systems, with which the systems can exploit mechanical body dynamics to deal with complex environment. Morphology of Underactuated Legged RobotsComplex anatomical structure is a fertile basis of animals' adaptive behavior. Likewise, "good" mechanical structures and material properties are an important prerequisite for fast, cheap and adaptive behavior of autonomous robotic systems. In this part of the project, we investigate the mechanical designs of legged robots that exploit passive dynamics and elasticity. When the mechanics is well-designed, the system requires very simple motor control for rapid locomotion behavior as previously demonstrated by a number of dynamic locomotion robots (e.g. walking, hopping, running and swimming) [2-4]. Figure 1 shows one of the simplest legged robot models. This single-leg robot consists of one position-controlled motor at the hip joint and two limb segments connected through an elastic passive joint. Interestingly, this system requires only a simple oscillation of the motor with no sensory feedback to stabilize itself into a periodic hopping behavior. Optimization of Motor ControlAlthough these underactuated systems exhibit interesting dynamic locomotion behavior in simple environment, it is not a trivial to deal with complex environment such as gaps, steps, and changes of ground friction. In general, a change of motor output influences the behavior of underactuated systems in a highly nonlinear manner. For this reason, we are currently investigating reinforcement learning architectures which are able to optimize motor control policies. Figure 2 shows an optimization result of the single leg robot in simulation. After several hundreds of trials and errors, the optimization process can discover a motor control policy, which exploits the passive dynamics of the robot to successfully maintain the balance of forward hopping locomotion in rough terrain. References:[1] Collins, S., Ruina, A., Tedrake, R., and Wisse, M.: Efficient bipedal robots based on passive dynamic walkers, Science Magazine, Vol. 307, 1082-1085, 2005. [2] Iida, F., Rummel, J., and Seyfarth, A. (2007). Bipedal walking and running with compliant legs, IEEE International Conference on Robotics and Automation (ICRA'07), (in press). [3] Rummel, J., Iida, F., and Seyfarth, A. (2006). One-legged locomotion with a compliant passive joint, Intelligent Autonomous Systems ? 9, Arai, T. et al. (Eds.), IOS Press, 566-573. [4] Iida, F., Gomez, G. J., and Pfeifer, R. (2005). Exploiting body dynamics for controlling a running quadruped robot. ICAR 2005, July18th-20th, Seattle, U.S.A., 229-235. |
|||
|