
Ensemble Control
Sai Ravela & Jessica Banks
Project Description
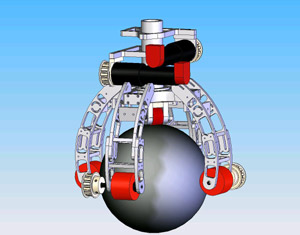
Recently the Segway HT introduced the public to how computer control of passively unstable systems can be applied to locomotion. This concept, however, has long been a topic of engineering and computer science research. A growing body of evidence supporting the feasibility and efficacy of a variety of actively balancing robot platforms has accumulated over the last two decades [1,2,3,4,5]. Such robots have nonlinear dynamical models that incorporate varying degrees of active stability. This research investigates the problem of dynamic stability control on Eggway (see figure), a holonomic sphere-based robot capable of omni-directional locomotion. Because it makes only a single point of contact with the ground, Eggway lacks any element of passive stability. (See Eggway for a detailed description of the robot).
Control of such a platform requires us to extend deterministic methods. This is because deterministic methods often require the dynamics to be linearized. However, since linearization is valid only about a fixed operating point and only within small error envelopes, various schemes have to be developed to account for the model-error resulting from these approximations. One scheme is the so-called adjoint method that solves two point boundary value problems over fixed or receding horizons. This method is not suitable for dealing with model-error because the resulting number of states that must be solved for can be too large. Even if we make the unrealistic assumption that models are perfect, adjoint methods may require many iterations to converge, rendering them unsuitable for real-time control. Another common scheme is the recursive solution, based on solving the "backward" algebraic riccatti equation (ARE). ARE solutions based on global linearized models are useless for our problem and ones based on local linearization can in fact be quite computationally expensive.
We study probabilistic control paradigms for nonlinear dynamics. Our proposed technique extends classical LQR where, instead of linearizing the model, joint second-order statistics between control inputs and forecasted states are used to synthesize feedback laws under quadratic performance criteria. Second order statistics between inputs and forecasts are obtained using monte-carlo methods. A sampled initial-distribution of control inputs is used to launch multiple forecasts from which a distribution of forecasted states is obtained. The joint second order statistics of control inputs and forecasted states are then used to compute feedback gains that back-propogate errors between forecasted states and goals into the control subspace at the current time. Thus, from a distribution of hypothesized control perturbations we obtain a distribution of forecasted states through dynamics. From this we obtain a posterior distribution of control actions through goals. This posterior distribution is sampled to generate the next control command. This scheme is also very efficient in contrast to recursive solutions. This is because explicit computation of the second moment of input uncertainty (covariance) is not necessary, nor is it necessary to linearize the system to propagate it.
Under a linear model, our scheme reduces to LQR. Under a nonlinear model, it preserves nongaussianity in the marginal distribution of state thereby providing a better description of sensitivity to control inputs than classical recursive methods. Since this method uses nonlinear models without modification, it is a better representation of true plant dynamics than linearized versions. However, simulation models are always imperfect. For example, assumptions about the physical world are rarely invariant, e.g., friction coefficients change as the robot moves from one surface to another. Since we can't and don't want to go about modeling the world to the last detail before letting our robot interact in the real world, we must compensate for such model imperfections, i.e., making up for model-error is essential. One way to do this is to treat model-error as a stochastic perturbation to the dynamical model. Our proposed method admits a wide variety of model-error models; in particular, it is not restricted to the traditional additive process noise formulation. We will explore nonadditive formulations.
In contrast to adjoint-based methods, our approach is not iterative, though it does require samples to be propagated forward under the dynamics. Since the state sizes are typically small for the problem at hand(<10), few samples will suffice for a full rank description of uncertainty. Therefore, we believe that this technique will not pose a computational bottleneck to efficiency though we don't know what the effect of small sample noise is. This will be an important factor in assessing the viability of our control paradigm and we will study the impact small samples exert on control quality.
Having synthesized an ensemble controller, we combine it with an ensemble filter that becomes the state's observer. Ensemble filters are constructed with the same methodology as the controller; the filtering problem is really just the dual of the control problem. Using this model-based ensemble filter-control paradigm we develop solutions for minimum energy and regulation problems. We will implement this framework first in simulation and then port it to Eggway.
The robot will allow for us to try the control scheme with different sensor configurations and under varying terrain conditions. We hope to prove that such a method can produce even more robust balance on a completely dynamically stable platform than that which some statically stable systems exhibit. This is a fairly unintuitive result. However, the features that make a particular platform even partially statically stable can actually undermine its mobility. The two-wheeled base configuration of the Segway, for example, determines a rigid polygon of support which can act as a moment arm for generating torques about the roll axis. A dynamic perturbation at one of those wheels, such as a bump or lateral collision, could effectively cause the platform to topple. It is our belief that ensemble control will be able to compensate for this kind of disturbance.
References:
[1] F. Grasser, A. D'Arrigo, S. Colombi, & A. Rufer. Joe: A mobile, inverted pendulum. In IEEE Transactions on Industrial Electronics, volume 49, pp. 107--114, 2002.
[2] K. Hirai, M. Hirose, Y. Haikawa, & T. Takenaka. The development of Honda humanoid robot. In IEEE International Conference on Robotics and Automation, 1998.
[3] T. Larson. Balancing robot project - "bender". Available from: http: //www.tedlarson.com/robots/balancingbot.htm.
[4] W. Nukulwuthiopas. Gyrobot. Available from: http://fibo.kmutt. ac.th/project/eng/current research/gyrobot.htm.
[5] Marc. H. Raibert. Legged Robots That Balance. MIT Press, Cambridge, MA, 1986.
The Stata Center, Building 32 - 32 Vassar Street - Cambridge, MA 02139 - USA tel:+1-617-253-0073 - publications@csail.mit.edu (Note: On July 1, 2003, the AI Lab and LCS merged to form CSAIL.) |