| Technical Reports | Work Products | Research Abstracts | Historical Collections |
![]()
|
Research
Abstracts - 2006
|
|
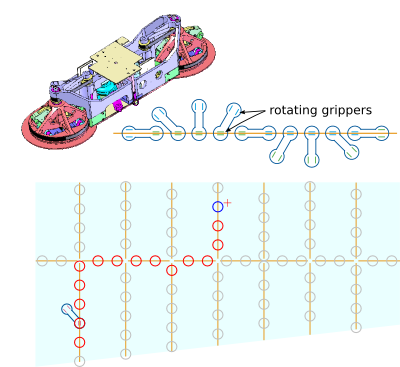
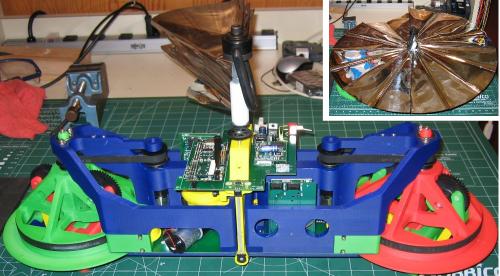
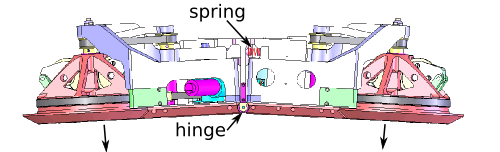
Shady: Towards Robust Truss Climbing With Mechanical CompliancesMarsette Vona, Carrick Detweiler & Daniela RusMotivationMany large terrestrial structures-towers, bridges, construction scaffolds-are sparse truss-like assemblies of rigid bars connected together at structural nodes, as are many elements of in-space structures, such as antenna/solar panel supports and space-station members. A long-term application of truss climbing robots is the automated assembly, repair, and inspection of such structures: a small climbing robot could grip the bars and locomote about the truss, conveying sensors, tools, or construction materials to a worksite. Potentially, the robot could then either carry out the desired task on its own or cooperate with a human worker or astronaut[1,2]. Truss climbing is a special case of structure climbing, with some particular challenges. In particular, the penalties for uncertainty are potentially much higher for truss-climbing than for climbing on planar surfaces (e.g. the exterior walls of a building). Consider foot placement. On a planar surface, foot placement can be resilient to significant parallel-plane misalignment, usually does not require strong certainty of the perpendicular distance to the surface (as the foot can often be extended until it hits the surface), and is similarly tolerant of orientation uncertainties. However, the comparable task in truss climbing---gripping a thin structural member starting from a nearby but uncertain spatial pose---can be much more sensitive: even small translation and orientation misalignments can result in a weak or completely missed grip. We are developing a simple mechanical structure with several specific and intentional mechanical compliances (springs) to address these challenges. Combined with wide-opening grippers and specific control algorithms, these compliances can allow significant translation and orientation misalignment and still succeed in a firm and certain grip. Many previously proposed structure climbing robots, e.g. as in Pack et al [3], and others referenced therein, are intended only to climb on planar surfaces. A few are designed for climbing on truss-like structures, e.g. Nechba, Xu, Brown et al's "mobile space manipulator SM2" [2] and Kotay and Rus' "Inchworm" [4], but most of these do not incorporate specific compliances for combating uncertainty. Technical ApproachOur current hardware, a robot called Shady, is intended for a very particular application, motivated by need: window shading. Our group works in a lab with a large wall-window, about 4m tall and 8m wide, which has no shades to block sunlight. Instead of traditional shades which would block the whole window, Shady will grip and locomote on the window frame to an optimal location where it will deploy a 0.6m diameter mylar shade, thus creating active personal shading in the lab. Shady (Figures 1, 2, and 4), is a bilaterally-symmetric mechanism with two rotating grippers and a central circular shade. Truss locomotion proceeds as a series of grip-rotate-grip steps. At present, Shady is only capable of locomoting on planar trusses like our lab's window frame; however we are currently developing a similar robot with an additional central twist DOF for climbing full 3D truss structures [5]. Mechanical CompliancesShady contains three un-actuated intentional mechanical compliances (springs): a central hinge (Figure 3) that biases the grippers towards the window frame, and torsion mounts on each gripper rotation actuator composed of antagonistic pairs of compression springs. Potentiometers measure the compression of all springs, so that knowledge of the compliant motions can be incorporated into the control algorithms. The antagonistic pair of springs on the gripper rotation motor forms a series-elastic actuator: the compression of the springs is a direct indicator of the actuator's applied torque, and can be used in a feedback loop to control that torque. Commanding zero torque can be particularly useful as it enables us to selectively turn the normally non-backdriveable rotation actuator into a freely backdriveable mechanism. This is useful in handling/configuring the robot and is also a critical component of the grip refinement algorithm , performed at each grip closing: (1) the gripper closes completely; taking up angular and translational misalignment in the rotation actuator springs , typically resulting in a configuration which is internally stressed and not fully seated on the gripped bar. To correct these two issues, the following four operations are then performed: (2) both gripper rotation actuators are commanded to zero torque, releasing internal stress; (3) after the mechanism settles, the rotation actuators are commanded to hold position; (4) the gripper is partially released, allowing the central sprung hinge to fully seat the gripper against the bar; (5) the gripper is closed a second time, resulting in a fully-seated and aligned grip. Experiments and ResultsA primary goal of this work is to realize robust and reliable locomotion on trusses with a relatively simple mechanism. Here we define a "step" as the following sequence: grip both sides on a vertical bar using the grip-refinement procedure; ungrip one side; rotate the other side 180°. Though this experimental work is still in an early stage, we have already demonstrated over 25 consecutive vertical steps.
References:[1] Ben Iannotta, "Creating robots for space repairs." In Aerospace America, pp. 36-40, May 2005. [2] Michael Nechyba and Yangsheng Xu, "Human-robot cooperation in space: SM2 for new space station structure." In IEEE Robotics and Automation Magazine, vol. 2, no. 4, pp. 4-11, Dec. 1995. [3] Robert T. Pack, Joe L. Christopher, and Kazuhiko Kawamura, "A rubbertuator-based structure-climbing inspection robot." In Proceedings of the 1997 IEEE International Conference on Robotics and Automation, Albuqurque, New Mexico, Apr. 1997. [4] Keith D. Kotay and Daniela L. Rus, "Navigating 3d steel web structures with an inchworm robot." In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, 1996. [5] Yeoreum Yoon, Carrick Detweiler, Marsette Vona and Daniela Rus. Self-Assembling Modular Truss Robot System with Active and Passive Units. In CSAIL Research Abstracts, 2006. |
|||
|