| Technical Reports | Work Products | Research Abstracts | Historical Collections |
![]()
|
Research
Abstracts - 2006
|
|
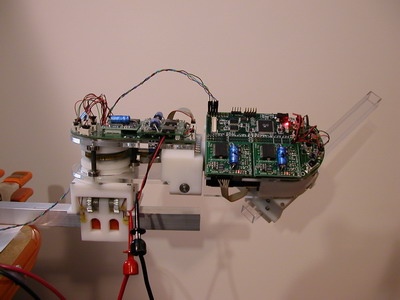
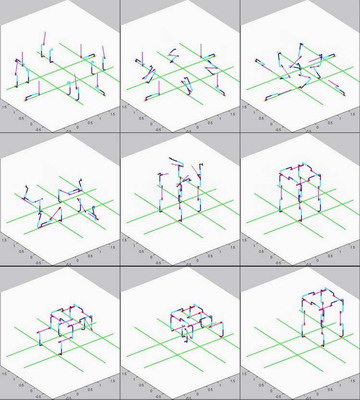
Self-Assembling Modular Truss Robot System with Active and Passive UnitsYeoreum Yoon, Carrick Detweiler, Marsette Vona & Daniela RusIntroductionWe are interested in a self-assembling modular robot system with active and passive units. This type of system consists of simple active units and passive units. Active units are modular robots which have simple structure and a small number of degrees of freedom. Passive units are simply un-actuated rigid parts which can be employed by active modules. Multiple active modules connect to and cooperate with one another by means of passive units to build large structures or to perform complicated tasks. This type of system is of interest because we can obtain various structures and functionalities from small, simple modules. Because it consists of two different types of modules, this system is a heterogeneous self-reconfigurable modular robot. We are developing a self-assembling modular truss robot system named Shady3D. Shady3D system has two kinds of modules--one is active and the other is passive. Each module has shape of a bar in a truss structure. Active modules have three motive degrees of freedom and actuating mechanism for them, but passive ones are simple rigid bars without any actuation. Research ContextSome other self-reconfiguring modular robots are heterogeneous. They consist of more than one type of modules. The Molecule [1] has male and female modules, and both modules are active in this system. I-Cube [2] is a modular robot system which consists of folding active modules and passive cubes. SOLAR [3] is a modular robot system in which active modules like a hockey puck cooperate with passive struts to build a 2D truss structure. Self-assembling and self-reconfiguring truss robot systems can be a promising application to robotic assembly for large structures in space. Shade3D Hardware DesignShady3D is the extension of the Shady robot [4] developed in DRL. The Shady robot is a four-degree-of-freedom robot designed to hold window frames. It has two motive degrees of freedom (DOF) to rotate two barrels on both sides of its body. Each barrel has a one-DOF gripper to hold a window frame. The movement of the Shady robot is confined to a two-dimensional plane by its kinematic topology. Shady3D extends this 2D Shady robot system to a full three-dimensional self-assembling modular robot system. Because the previous Shady robot is confined to a 2D plane, it is unavoidable to add degrees of freedom to obtain a module which can move in three-dimensional space. To make design and control of the modules simple, we tried to keep the total degrees of freedom of each module as low as possible. We added one more degree of freedom--the middle rotational DOF--to the 2D Shady structure. Thus, an individual Shady module has three motive degrees of freedom--two for rotation of two gripper joints and one for the middle joint. If we need more than three DOFs, multiple modules can be connected. With two modules connected hand-to-hand directly, we obtain five motive DOFs. If we introduce a passive bar as a medium of connection, the combination of two active Shady modules and a passive bar becomes a six-DOF manipulator, which is able to have arbitrary position and orientation in 3D space. Based on this design concept, we are developing a hardware prototype of the active module (See Fig. 1). It has five degrees of freedom--three motive DOF mentioned above and two for opening and closing two grippers. We use five motors and worm and gear power transmission to implement these degrees of freedom. Grippers are designed to hold a bar with square cross section. When they are opened, gripper paddles are fully retracted so as not to obstruct movement of the robot on a truss. Most of hardware parts are custom designed and built with a fused deposition modeling (FDM) machine and a laser cutter. We divided electronics into parts for low-level control and high-level control. For low-level control, we use general-purpose motor control boards that we developed and Robostix control board from Gumstix, Inc. One motor control board is devoted to one motor, so we use five of it for one module. It gives PWM signal to a motor according to commands given through serial communication. Motor control boards are connected to Robostix board through RS485 serial communication. Robostix selects motors and sends commands according to commands from the higher level. For high-level control, we use Gumstix computer from Gumstix, Inc. The program on it will move the module from one point to another on the truss structure environment and to make it cooperate with another module. Gumstix and Robostix will communicate through a serial port. In addition, it has Bluetooth wireless communication function which can be used for passing messages among multiple modules. Sensors are used for positioning of rotational joints and alignment of grippers. Encoders and potentiometers are used for motor positioning. Detector switches are employed to set the zero position of joint motors. In addition, we use other detector switches for gripper alignment. ControlThe active Shady module has three basic functions. First of all, it rotates revolute joints by desired degrees. This function is implemented by position feedback control. A motor control board uses negative feedback based on the position sensor value from an encoder. Then a PID controller generates control signal according to the error. The second function is to find a reference position from which the joint angle is counted. To find the reference position, we use a detector switch mechanically turned on when a joint reaches that position. When the switch is turned on while rotating the joint, the module stops the motor and sets the counter to zero. The third function is to open and close grippers. This is performed based on the gripper paddle's position obtained by a potentiometer. The module also corrects misalignment of the gripper on a bar during closing process. It checks four detector switches on the gripper paddles and rotates the corresponding joint according to switch values. AlgorithmsWe developed a cooperation algorithm to build a tower structure with active Shady modules and passive bars. We have simulated this algorithm with MatLab. Fig. 2 shows some snapshots of the simulation. Active Shady modules are shown in blue, and passive bars in pink. First, two Shady modules connect to each other by means of a passive bar and make a 6-DOF manipulator. Then they pick up other modules and build a tower. They also move the tower by rotating joints synchronously. In this manner, Shady3D robot system can implement self-assembling and self-reconfiguring of truss structure in 3D space: it can form and change shape. References:[1] Keith Kotay and Daniela Rus. Efficient Locomotion for a Self-Reconfiguring Robot, In Proceedings of the IEEE International Conference on Robotics and Automation, Barcelona, Spain, 2005. [2] Unsal, C., and P.K. Khosla, Mechatronic Design of a Modular Self-Reconfiguring Robotic System, In Proceedings of the IEEE International Conference on Robotics and Automation, pp. 1742-1747, San Francisco, CA, 2000. [3] Jacob Everist, Kasra Mogharei, Harshit Suri, Nadeesha Ranasinghe, Berok Khoshnevis, Peter Will, and Wei-Min Shen. A System for In-Space Assembly. In Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, Sendai, Japan, 2004. [4] M. Vona, C. Detweiler, and D. Rus. Shady: Towards Robust Truss Climing With Mechanical Compliance. In CSAIL Research Abstracts, 2006. |
|||
|