| Technical Reports | Work Products | Research Abstracts | Historical Collections |
![]()
|
Research
Abstracts - 2006
|
|
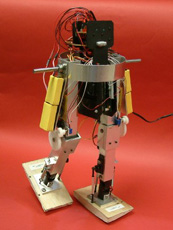
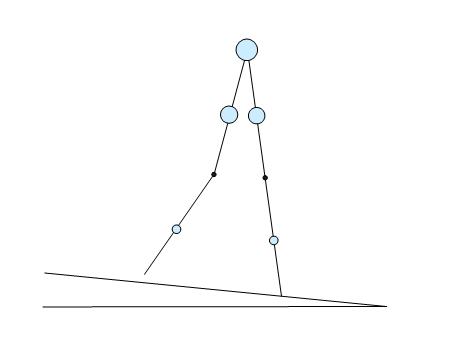
Bipedal Walking with KneesVanessa Hsu & Russ TedrakeMOTIVATIONPassive dynamic walking has emerged as a promising alternative to traditional position controlled bipedal robot locomotion. Passive dynamic walkers are mechanical devices able to walk in a stable gait down a ramp with no actuation. This approach relinquishes full control of the robot at certain phases of its cycle in order to exploit the natural dynamics of the system. The resulting systems are very efficient and possess natural gaits, but are highly sensitive to initial conditions and noise. In recent years, PDW principles have been explored with both simple analytical models and experimental examples. Several walkers have been built and have successfully demonstrated stable gaits, both entirely passively and with actuation (which allows them to walk on flat terrain). However these robots, particularly the kneed ones, have shown to have a very small basin of attraction, making them particularly susceptible to disturbances. Conversely, the stability and dynamics of the simplest passive dynamic systems have been analytically studied with the Rimless Wheel and Compass Gait models. However, there has been no analogous study of the stability for a kneed walker. The Ballistic Walker looks at the dynamics of a kneed walker within one step cycle, but disregards the stability issue. CURRENT WORKToddler, shown on the left in Figure 1, was built to show the concepts of passive dynamic walking and optimal control in the simplest physical system. Toddler used an online learning controller to readjust and find a stable gait under changing conditions by using reinforcement learning methods. The adaptive nature of the controller enabled Toddler to reject disturbances in different environments as it quickly re-learned an approximation of the optimal policy for new conditions. The natural extension is to build a kneed-version of Toddler. By analytically studying the dynamics of a kneed walker, and optimizing its stabilizing within an optimization framework similar to Toddler's, we wish to have a rigorous way of building a more robust walker than the currently existing ones. Our simplest model of a kneed walker, shown in Figure 2, consists of a four-link biped with point feet and a hip mass. The system is entirely passive, except for a knee lock that occurs when the swing leg straightens out. The knee lock and heelstrike are modeled as inelastic collisions, where angular momentum is conserved. The system switches between the dynamics of a three-link pendulum when the knee is not locked, and a two-link pendulum, like the Compass Gait model, when the legs are straight. We have seen that the stability of this system depends heavily on both the physical parameters (i.e., mass ratios, position of center of mass and link lengths) and the initial conditions. We use optimization methods to find physical parameters which will give rise to a system with a sufficiently big basin of attraction to be a good walker. Future work includes building such a robot using the optimized parameters, and working on an actuated version with a similar learning controller as Toddler's. Additionally, once this model is understood clearly, we will add feet. The feet change the dynamics significantly but also provide more stability. REFERENCES[1] Tedrake, Russell L. Applied Optimal Control for Dynamically Stable Legged Locomotion. PhD thesis, Massachusetts Institute of Technology, 2004. [2] Simon Mochon and Thomas A. McMahon. Ballistic walking: An improved model. Mathematical Biosciences, 52(3-4):241-260, December 1980. [3] Steven Hartley Collins and Andy Ruina. A bipedal walking robot with efficient and humanlike gait. Proc. IEEE International Conference on Robotics and Automation, Barcelona, Spain, Apr 2005. [4] Martijn Wisse and Jan van Frankenhuyzen. Design and construction of Mike; a 2D autonomous biped based on passive dynamic walking. In Proceedings of the International Symposium on Adaptive Motion of Animals and Machines, 2003. [5] M. Yamakita and F. Asano. Extended passive velocity field control with variable velocity fields for a kneed biped. Advanced Robotics, 15(2):139-168, June 2001. |
|||
|