| Technical Reports | Work Products | Research Abstracts | Historical Collections |
![]()
|
Research
Abstracts - 2006
|
|
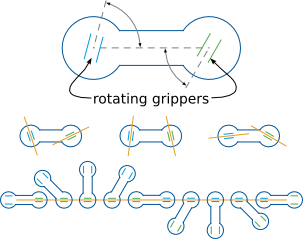
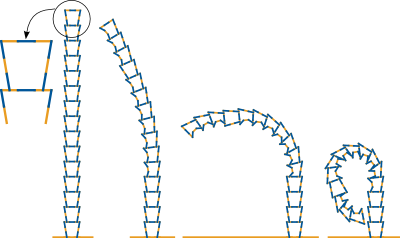
Hierarchical Control for Self-assembling Mobile Trusses with Passive and Active LinksCarrick Detweiler, Marsette Vona, Keith Kotay & Daniela RusIntroductionSelf-reconfiguring robots are modular robot systems that are physically connected and capable of making structural geometric changes autonomously. We describe a special class of heterogeneous self-reconfiguring robots we call active trusses, which look like trusses and are comprised of two types of modules: passive structural modules which may either be fixed in the environment or free to move individually, and mobile active modules which may pick up or climb on the passive modules, organize and hold them in a desired shape, and actively move them for self-assembly, self-reconfiguration, or self-repair purposes. The passive modules can be passed around by the active modules and coordinated to form the skeleton of a large class of truss geometries. Such active trusses have many potential applications, ranging from self-assembly of truss structures for space exploration to creating dynamic scaffolds and movable towers for construction tasks. Our proposed systems and algorithms are related to prior work in the fields of self-reconfiguring robots, hyper-redundant robots, and variable-geometry truss robots. One major difference in our present work is that we envision an abstract continuum of modular truss robots with varying functionality. The simple end of the continuum is a fixed truss with one active climbing unit (see [1, 2]), and the complex end is a self-assembling/self-reconfiguring variable-geometry truss composed of active and passive robot modules, described below. Examples of intermediate points along the continuum include a fixed truss with multiple independent climbing units and manually-assembled variable-geometry trusses. It is likely impractical to specify a single module design which applies to all active truss applications, so instead we propose abstract module models which can be scaled, adapted, and specialized to yield hardware appropriate for classes of applications. This allows us to re-use not only the basic electromechanical layout, but also kinematic control algorithms---path planner, hierarchical control methods, and user-interface visualization/commanding. We propose two abstract module models (figure 1): passive units, which are simple rigid bars; and active units which incorporate two rotating grippers and which grip one or more passive units. Our work to-date includes both 2D (planar; shown) [1, 2] and 3D [3] trusses. Concept of Hierarchical ControlA key concept we have been developing is the hierarchical control of large-scale truss robots. We divide the total set of active and passive modules into disjoint groups, and we design particular controllers and planners for these smaller groups (there may be many instances of the same type of group, so the total number of distinct group control algorithms may be much lower than the total number of group instances). We also implement controllers and planners which operate at the highest level, and which consider the aforementioned groups to be monolithic meta-modules, thus forming a two-level hierarchy of control. Meta-modules in self-reconfiguring robots have previously been explored [4, 5, 6, 7], but mostly in the context of topological reconfiguration and structural shape-changing. We extend the concept to also include kinematic/geometric control (e.g. figures 2 through 7) and we also generalize it to a hierarchy of module-group controllers which may each have several different operational modes. Tower SimulationsAs an example of hierarchical control, figures 2 through 5 show a simulation of the construction and operation of a reconfigurable mobile tower. The groups, in this case, are composed of five active modules (blue segments) and four passive modules (orange segments). We have developed a set of seven separate controllers for such groups which can (in simulation)
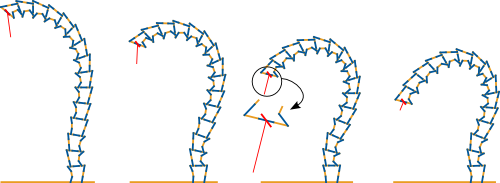
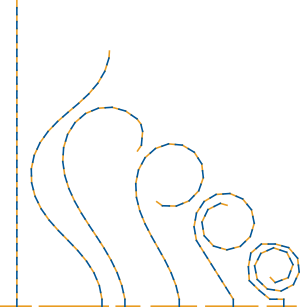
Using these group controllers, we can easily direct the simulated construction of an arbitrary-height tower. Figure 5 shows a 15-block tower containing 75 active modules and 60 passive modules. Once such a tower is assembled, we can apply a high-level controller to command the blocks to collectively perform a task. We have explored high-level controllers which utilize the block-tilting group controller to make the tower a hybrid serial-parallel hyper-redundant active structure, allowing it to bend and move like a tentacle. A possible application is tower-self inspection: a camera mounted on the tower top could be positioned to inspect lower sections. We have implemented a keyframe-type high-level controller which interpolates among manually specified vectors of block-tilt values (figure 5), and we have also implemented a damped-least-squares (DLS) inverse kinematics control, following [8], which allows the user to interactively drag the tower towards a goal configuration (figure 6). The high-level controllers were implemented carefully to only rely on a generic abstraction of the block-tilt controller, so we can use the same high-level control code to actuate towers made of different types of blocks. Figure 7 shows an alternate single-chain tower in several poses under the DLS IK control. AcknowledgmentThis work was supported by Intel, NSF IIS-0426838, and MURI ARO W911NF-0510219. References:
[1] Carrick Detweiler, Marsette Vona, Keith Kotay and Daniela Rus. Hierarchical Control for Self-assembling Mobile Trusses with Passive and Active Links. To appear in Proceedings of the 2006 IEEE International Conference on Robotics and Automation, 2006. [2] Marsette Vona, Carrick Detweiler & Daniela Rus. Shady: Towards Robust Truss Climbing With Mechanical Compliances. In CSAIL Research Abstracts, 2006. [3] Yeoreum Yoon, Carrick Detweiler, Marsette Vona and Daniela Rus. Self-Assembling Modular Truss Robot System with Active and Passive Units. In CSAIL Research Abstracts, 2006. [4] Serguei Vassilvitskii, Jeremy Kubica, Elanor Rieffel, John Suh, and Mark Yim. On the General Reconfiguration Problem for Expanding Cube Style Modular Robots. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation, pp. 801--808, Washington, DC, 2002. [5] An Nguyen, Leonidas J. Guibas, and Mark Yim. Controlled Module Density Helps Reconfiguration Planning. In Proceedings of WAFR 2000: New Directions in Algorithmic and Computational Robotics, pp. 23--36. 2000. [6] Daniela Rus and Marsette Vona. Crystalline Robots: Self-reconfiguration with Compressible Unit Modules. In Autonomous Robots 10:1, pp. 107--124. 2001. [7] A. Pamecha, I. Ebert-Uphoff, and G.S. Chirikjian. Useful metric for modular robot motion planning. In IEEE Transactions on Robotics and Automation, 13:4, pp. 531--545. 1997. [8] Samuel R. Buss. Introduction to Inverse Kinematics with Jacobian Transpose Pseudoinverse and Damped Least Squares Methods. Unpublished, available only on the web. |
|||
|